多视图几何学教程:透视投影与基础矩阵解析
需积分: 0 63 浏览量
更新于2024-07-26
收藏 3.99MB PDF 举报
"Multiple View Geometry 课件提供了关于多视图几何学的深入教学,由Richard Hartley和Andrew Zisserman撰写,最初在1999年的CVPR(计算机视觉与模式识别)会议上发布。该课件主要关注单视图和双视图几何学,并涵盖了重要的理论和技术。"
在多视图几何学中,我们首先讨论的是透视投影相机。这种类型的相机通过一个3x4的矩阵来表示,这个矩阵通常称为投影矩阵。透视投影是模拟人眼观察物体的方式,它将三维空间中的点映射到二维图像平面上。在数学表达式中,一个点(X, Y, Z)在经过透视投影后会变为(x, y, f),其中λ=Z/f是缩放因子,确保了远距离的点在图像上会变得更小。
透视变换是多视图几何中的核心概念。最一般的透视变换发生在两个平面之间,如世界平面和图像平面,或者由同一世界平面诱导的两个图像平面。这种变换可以由四个或更多对应点的关系来计算,这是基于共线性方程的。
双视图几何中的一个重要元素是基线上的两个摄像机之间的epipolar几何。这由基本矩阵来表示,它能够描述两个视图之间的对应点之间的关系。基本矩阵可以从七个或更多对应点的坐标计算得出,这是基于八点算法的基础。
课件还提到了成像几何,包括透视投影的概念。透视投影可以视为一个线性映射过程,通过在齐次坐标系中操作来实现。3x4的投影矩阵将三维空间中的点映射到二维图像坐标系,内部参数如焦距(f)、图像坐标系统的偏移(x0, y0)也在其中发挥作用。
内部摄像机参数如kxx和kyy代表像素尺度,用于校正由于镜头畸变导致的图像坐标系中的像素坐标与实际长度之间的差异。kxxcam和kyycam分别表示x和y方向的像素单位与物理长度单位之间的转换系数。
这个Multiple View Geometry课件是理解计算机视觉中多视图几何原理的宝贵资源,涵盖了从基础的透视投影到复杂的双视图几何和摄像机内部参数的诸多方面。这些知识对于进行立体视觉、3D重建、运动分析等应用至关重要。
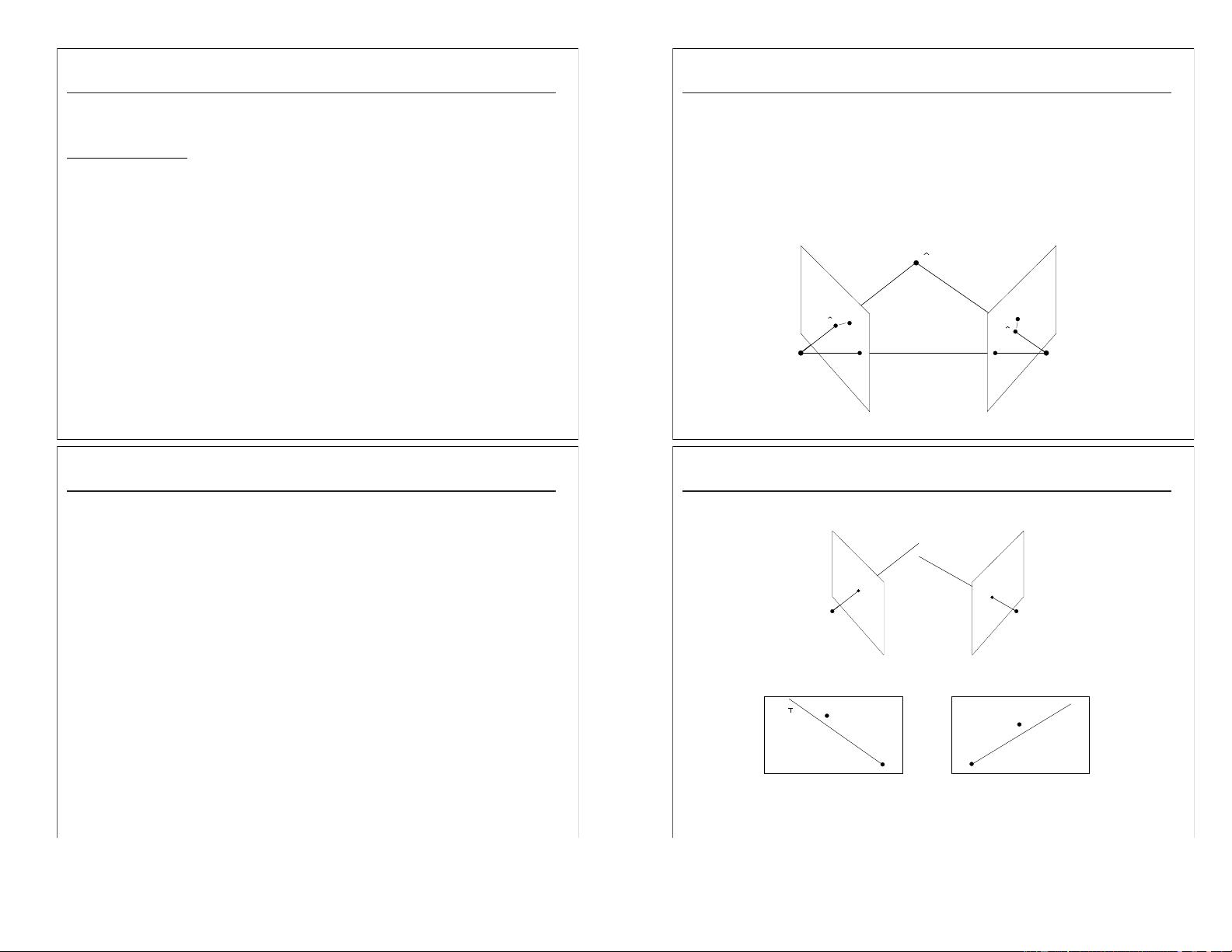
Projective Reconstruction from 2 views
Statement of the problem
Given
Corresponding points x
i
↔ x
i
in two images.
Find
Cameras P and P
and 3D points X
i
such that
x
i
= PX
i
; x
i
= PX
i
Projective ambiguity of reconstruction
• Solution is not unique without camera calibration
• Solution is unique up to a projective mapping :
P → PH
−1
P
→ P
H
−1
X
i
→ HX
i
Then verify
x
i
=(PH
−1
)(HX
i
)=PX
i
x
i
=(P
H
−1
)(HX
i
)=P
X
i
• Same problem holds however many views we have
Projective Distortion demo
< Projective distortion demo >
剩余56页未读,继续阅读
104 浏览量
112 浏览量
2011-12-12 上传
194 浏览量
621 浏览量
113 浏览量
182 浏览量
390 浏览量
206 浏览量

testxyz
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
