自动驾驶传感器详解:摄像头、激光雷达、毫米波雷达与惯性传感器
需积分: 9 177 浏览量
更新于2024-07-09
收藏 3.54MB PDF 举报
"多传感器融合-第一章-常用传感器硬件介绍"
在自动驾驶技术中,传感器的融合是关键,本文主要介绍了几种常见的传感器硬件,包括摄像头、激光雷达、毫米波雷达、惯性传感器、全球导航卫星系统(GNSS)与实时动态定位(RTK),以及一些其他类型的传感器。
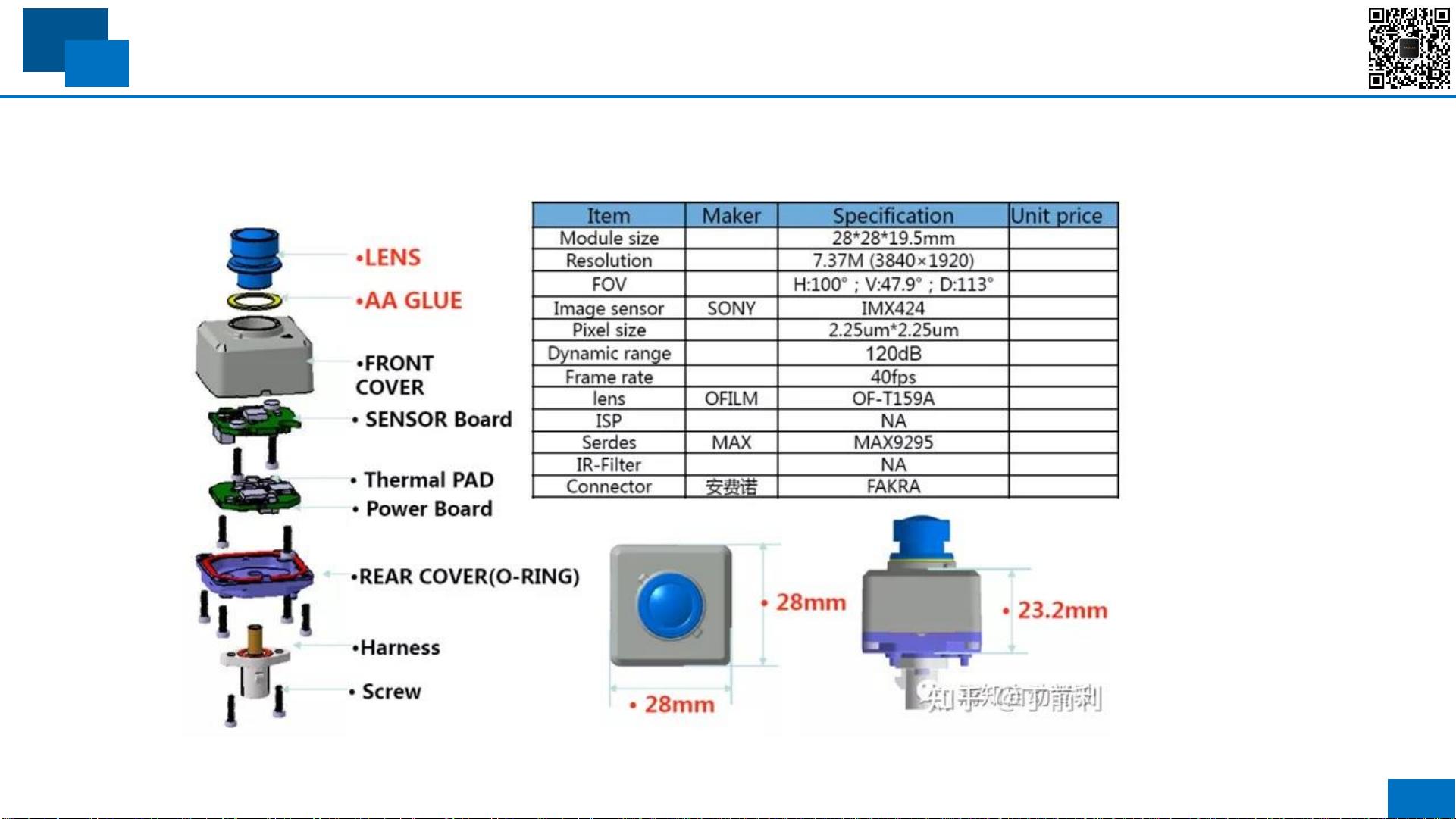
首先,摄像头是自动驾驶系统的核心传感器之一。它能捕捉到环境的视觉信息,如物体类型、颜色、形状等,相当于车辆的“眼睛”。摄像头的工作原理是通过光学组件捕获光线,然后由CMOS图像传感器将光信号转化为电信号,并进一步处理成数字图像。镜头组件包括镜片、滤光片和保护膜,而CMOS图像传感器由微透镜、彩色滤光片、光电二极管和光电转换器件等组成。摄像头的应用广泛,包括前视、侧视、后视和环视等,分别用于识别障碍物、车道线、交通信号、盲区检测和泊车辅助等。
其次,激光雷达(LiDAR)利用激光脉冲测量距离,提供高精度的三维点云数据,用于构建环境的精确地图,识别物体的位置和形状。而毫米波雷达则使用毫米波进行探测,穿透力强,能在恶劣天气下工作,主要用于远距离目标检测和测速。
惯性测量单元(IMU)结合了加速度计和陀螺仪,能够测量车辆的加速度、角速度和姿态,提供运动学信息,特别是在短时失去其他传感器数据时,IMU依然能提供连续的定位信息。
全球导航卫星系统(GNSS)和实时动态定位(RTK)则用于精确的地理位置信息。GNSS通常包括GPS、GLONASS、Galileo和BeiDou等系统,提供全球覆盖的定位服务。RTK则能显著提高GNSS的定位精度,达到厘米级,适用于需要高精度定位的自动驾驶场景。
此外,还有其他类型的传感器,如超声波传感器常用于短距离障碍物检测,热红外传感器能感知温度差异,用于夜视和热源检测。
多传感器融合的关键在于互补各种传感器的优缺点,确保自动驾驶系统在各种环境条件下都能准确、可靠地感知周围环境,从而实现安全高效的自动驾驶。
9
公众号:3D视觉工坊
一、摄像头介绍
车规级摄像头性能要求
自动驾驶中摄像头主要需要满足的要求
耐高温:-40摄氏度至85摄氏度,且能够适剧烈温度变化。
抗震性:车载摄像头抗各种强度震动。
防水性:全天候全天时,密封严实,雨水中浸泡仍正常。
,
使用寿命:车载摄像头的使用寿命至少10年。
高动态低噪点:高动态性;光线较暗下抑制噪点的产生。
对于某些特定功能的摄像头,还需要水平视场角比较广。
剩余49页未读,继续阅读
2021-06-17 上传
131 浏览量
2020-04-21 上传
2020-02-15 上传
2022-06-28 上传
288 浏览量
2022-07-01 上传
2022-11-11 上传
2020-03-04 上传

m0_53400924
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
