CAN总线驱动的高效电动车控制系统设计与抗干扰优化
123 浏览量
更新于2024-09-01
收藏 242KB PDF 举报
本文主要探讨了基于CAN总线的电动车控制系统设计方案,CAN(Controller Area Network)作为一种高效、可靠的汽车通信协议,正逐渐成为电动汽车电子控制系统的关键组成部分。该系统的核心优势在于其采用短帧报文结构,这显著减少了数据传输时间,提高了系统的实时性和响应速度,增强了抗干扰能力,确保在复杂汽车环境中稳定运行。
在设计上,整个控制系统由电池管理系统(BMS)、充电机、电动机控制器和整车控制器等模块组成,形成一个协同工作的网络。CAN总线上有四个通信节点,它们之间通过非破坏性仲裁机制进行数据交换,避免了冲突,保证了信息的准确传递。例如,整车控制器接收来自BMS、充电机和电机控制器的各种参数,同时控制充电机的工作和电机控制器的运行,确保电动汽车的动力管理与电池状态监控的有效协调。
CAN总线节点的硬件电路设计则是实现这种高效通信的关键。CAN协议作为标准接口,简化了不同电子控制系统之间的连接,降低了系统的复杂性和成本。通过优化硬件设计,系统能实现高效的出错检测和故障自动关闭功能,一旦发现错误或故障,能够立即采取措施保护整个系统的安全。
电动汽车的快速发展和环保需求推动了电子控制系统向智能化和集成化发展,尤其是整车电子控制系统,它直接关系到电动汽车的性能、效率和可靠性。本文提出的设计方案,不仅符合电动汽车的节能和可靠原则,而且在技术应用上具有前瞻性和实用性,对于推动我国电动汽车市场的发展具有重要意义。
基于CAN总线的电动车控制系统设计是一种创新解决方案,它通过优化的通信架构、高效的协议机制以及抗干扰能力,实现了电动汽车在动力控制、电池管理和整体性能上的高效管理,对于提升电动汽车的技术水平和市场竞争力具有重要价值。
基于基于CAN总线的电动车控制系统设计方案总线的电动车控制系统设计方案
本文设计了一种基于CAN总线的电动汽车整车电子控制系统,本系统采用短帧的报文结构,数据传输时间短,
具有很强的抗干扰性,具有高效的非破坏总线仲裁,出错检测和故障自动关闭等优点。
随着现代汽车的快速发展,汽车电子设备不断增加,传统的接线方式已远远不能满足汽车愈加复杂的控制系统要求,汽车控制
局域网CAN总线应运而生,它广泛应甩于汽车电子控制系统中,也是唯一一个成为国际标准的汽车局域网。
目前,由于环境污染和能源危机问题日益严重,电动汽车的发展开始得到各国的高度重视,成为未来汽车发展的主流方向。电
动汽车主要具有三大关键技术:驱动控制系统、电池电源、整车电子控制系统。整车电子控制系统必须满足纯电动汽车的设计
理念,使之既节能又简单可靠。在目前电池技术水平下,解决两大关键技术,有助于电动汽车在中国首先市场化,其经济意义
不言而喻。 电动汽车动力系统结构复杂多样,部件类型繁多。先进高效的控制体系结构,可以使电动汽车各动力系统之间的
数据交换满足简单迅速、可靠性高、抗干扰能力强、实时性好、系统错误检测和隔离能力强等要求。
本文设计了一种基于CAN总线的电动汽车整车电子控制系统,本系统采用短帧的报文结构,数据传输时间短,具有很强的抗
干扰性,具有高效的非破坏总线仲裁,出错检测和故障自动关闭等优点。
1 控制系统整体结构
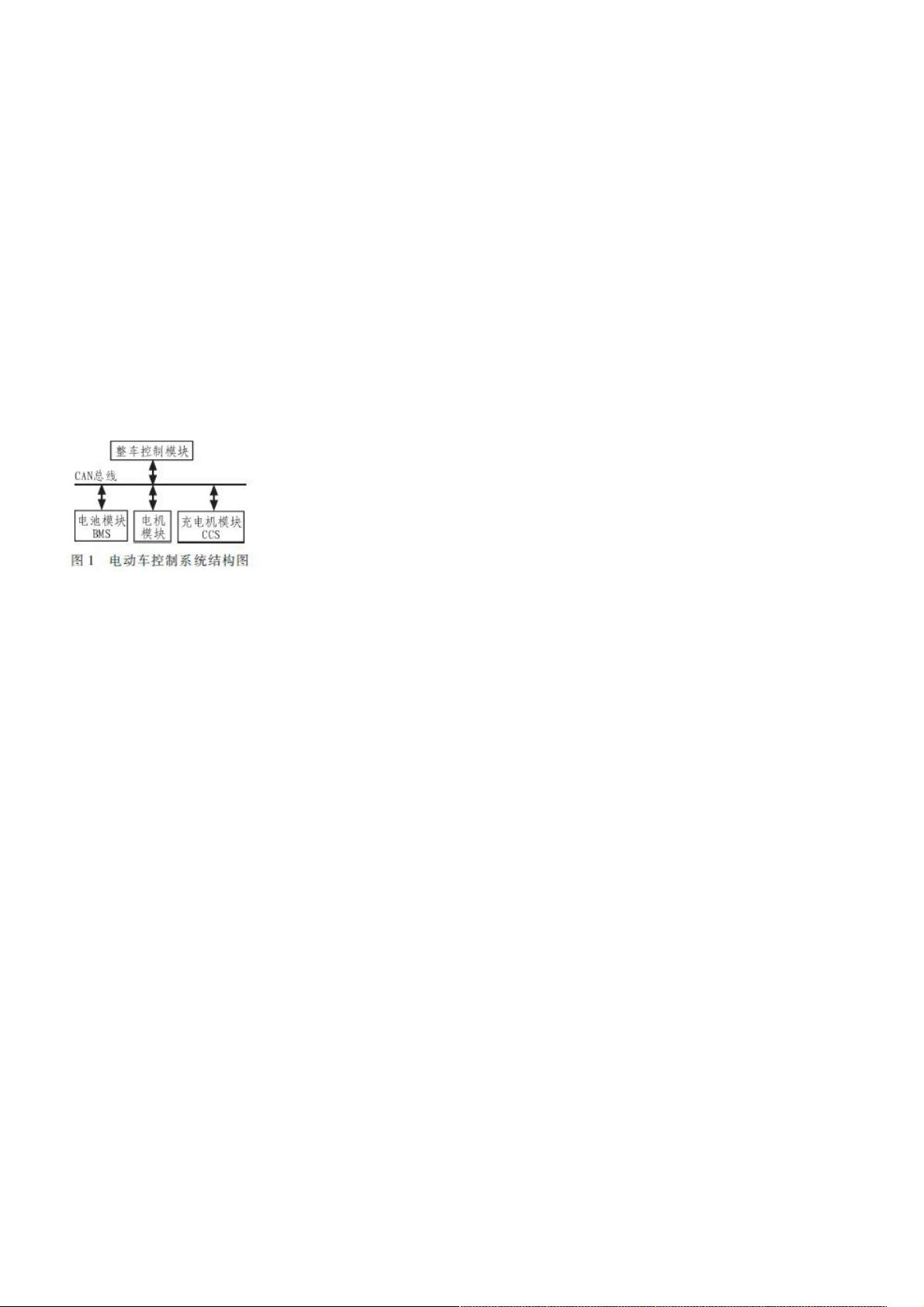
电动车控制系统由电池管理、充电机、电动机和整车控制等模块组成。本系统总体结构如图1所示。
由图1知,CAN通信网络上共有4个通信节点。整车控制器接收BMS、CCS、电机控制器的报文提供的各种参数;充电机接收
BMS发送的控制信息并根据报文数据的电压电流设置来工作;电机控制器接收BMS发送的电池状态信息设置来工作,同时电
机控制器接收由整车控制器发送的控制信息并根据报文数据的转矩设置来工作。
2 CAN总线节点的硬件电路设计
CAN是ControllerAreaNetwork的缩写,是ISO国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方
便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的
要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应"减少线束的数量"、"通过多个LAN,进行大量数
据的高速通信"的需要,1986年德国电气商博世公司开发出面向汽车的CAN通信协议。此后,CAN通过ISO11898及ISO11519
进行了标准化,现在在欧洲已是汽车网络的标准协议。现在,CAN的高性能和可靠性已被认同,并被广泛地应用于工业自动
化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域
网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
整车控制节点是基于STM32F103VE设计的。ARMCortex TM-M3是一款高性能、低成本、低功耗的32位BISC处理器,可在高
达72 MHz的频率下运行,拥有512 KB的片内Flash程序存储器,具有64 KB的RAM数据存储器,可进行高性能的CPU访问。
该徽控制器包含1个USB2.0全速(12 Mb/s)设备、1路CAN2.0B通道、1个通用DMA控制器、3个16位的A/D转换器和1个16
位的D/A转换器。同时该微控制器具有4个16位捕获/比较定时器和1个看门狗定时器,因此ARM cortexTM-M3可以满足电动车
控制的需要,减少了系统硬件设计的复杂度。STM32F103VE支持J-Link实时仿真和跟踪,内部搭载有1通道的支持CAN20.B
规格的CAN控制器,使得CAN通信模块的设计更加方便。整车控制节点硬件电路图如图2所示,由徽控制器STM32F103VE、
CAN总线收发器82C250、2个高速光耦16N137等组成。
下载后可阅读完整内容,剩余3页未读,立即下载
141 浏览量
126 浏览量
119 浏览量
132 浏览量
2021-04-17 上传
169 浏览量
107 浏览量
112 浏览量

weixin_38664989
- 粉丝: 4
- 资源: 906
 我的内容管理
展开
我的内容管理
展开







最新资源
- 个人数字证书与CA认证.pdf
- Electronics Workbench(ewb)简明中文教程
- 单片机设计题目要求 温度计
- C语言嵌入式系统编程修炼之道.pdf
- Java swing学习课件
- JavaEye论坛热点_-_2008年11月
- C++标准程式库.pdf
- VC++2005入门经典(英文版).pdf
- 2009年计算机等级考试四级数据库工程师考试 课后答案
- 手工创建数据库,在命令提示符下的创建操作步骤.
- J2ME企业级开发-j2me
- 雅思听力807词汇表
- [教程] 权威揭密 笔记本硬件结构终极教程&_8226_(上、中、下)
- 编程相关日语词汇 基本的
- ITIL_V3的五大生命周期管理.pdf
- 2009年计算机等级考试四级数据库工程师考试重难点
