CAPL程序结构解析:从入门到精通
23 浏览量
更新于2024-08-03
收藏 228KB PDF 举报
"这篇资源是关于车载测试的CAPL(CAN Automation Programming Language)入门教程的第三部分,主要讲解CAPL程序的基本结构,包括头文件、全局变量定义、事件处理和自定义函数。CAPL是一种类似于C语言的脚本语言,用于在CANoe环境下进行车载通信的测试和自动化。"
CAPL程序结构是理解和编写有效CAPL代码的基础。它通常由以下几个关键部分组成:
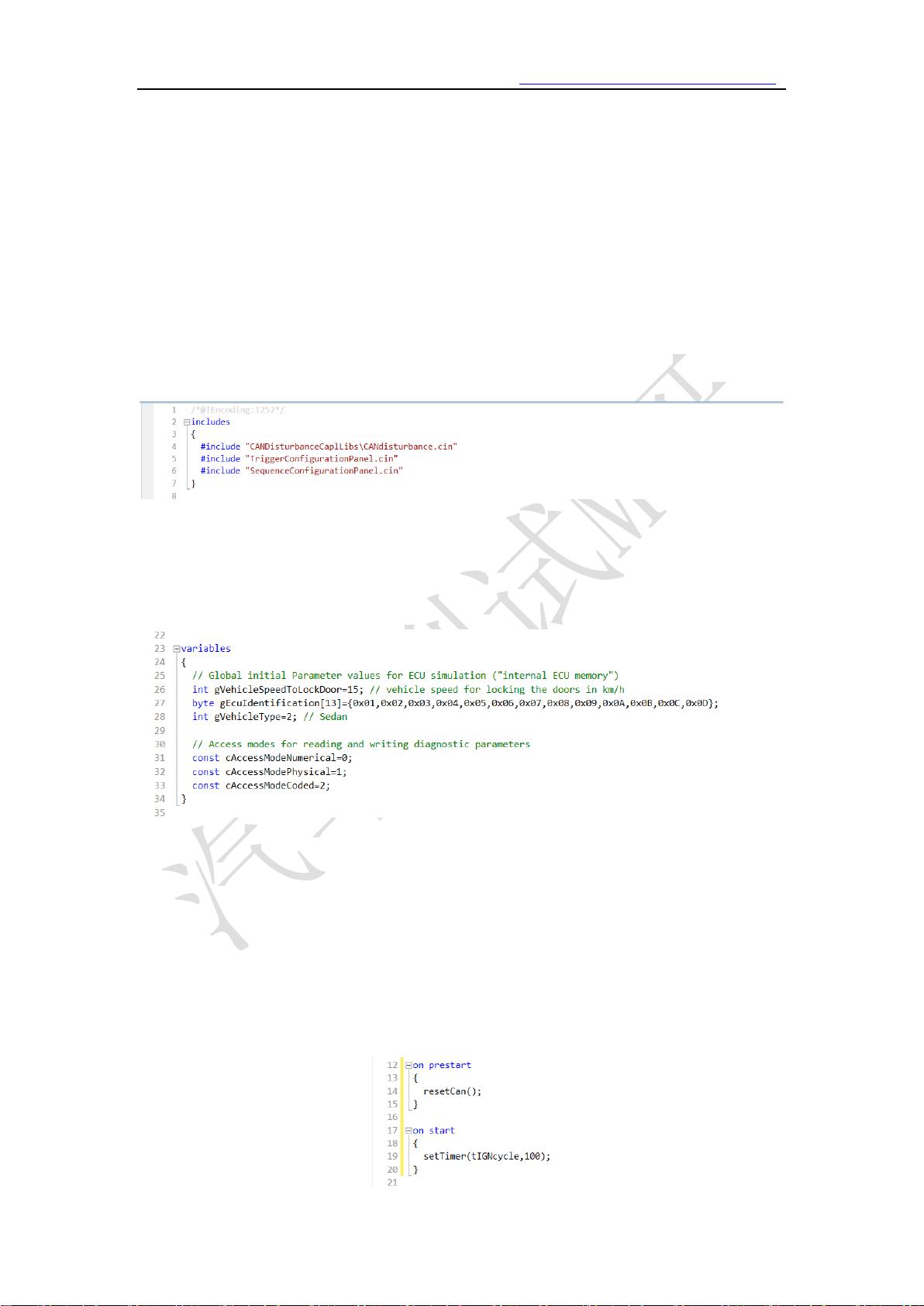
1. 头文件:在CAPL中,头文件通常包含`.cin`文件,用于存储可重用的代码段,提高代码的复用性和模块化。通过`includes{}`来引用这些头文件,这有助于组织大型项目,使代码更易于管理和维护。
2. 全局变量定义:全局变量在`variables{}`块中声明,其作用域贯穿整个CAPL程序,从程序开始到结束。全局变量可以在程序的不同部分被访问,用于在整个程序中保持数据的一致性。
3. 事件处理:CAPL是一种面向事件的编程语言,这意味着程序的行为由特定事件触发。常见的事件类型包括:
- 系统事件:如`onprestart`、`onprestop`和`onstart`,这些事件在CANoe环境的特定生命周期阶段触发。
- CAN控制器事件:响应CAN硬件的状态变化,如`busoff`和错误事件。
- 报文事件:当接收到特定CAN报文时触发。
- 信号事件:与DBC(数据库文件)配合使用,当总线上出现特定信号时触发。
- 定时器事件:在特定时间间隔后触发,可用于实现循环或定时任务。
4. 自定义函数:CAPL允许用户创建自己的函数,以便封装和重用代码。这些函数可以独立于事件执行,提供更高的代码复用性和逻辑分离。
CAPL中的定时器事件利用了不同类型的定时器变量,如`timer`,它们基于时间间隔触发相关的过程。通过`setTimer`函数启动定时器,并在`ontimer`过程中处理事件。定时器变量`this`可以用来访问和管理当前激活的定时器。
理解CAPL的这些基本结构对于有效地编写车载通信测试脚本至关重要。通过合理的程序结构和事件驱动机制,CAPL能够灵活地应对复杂的测试场景,确保在CANoe环境中进行高效、精确的车载通信测试。
CAPL 入门篇—CAPL 语言简介 汽车测试 M 哥(https://blog.csdn.net/qq_38705667?type=blog)
1
CAPL
程序结构
每种编程语言都有一定的程序结构,这样不仅看起来思路清晰,而且还便于移植;CAPL
作为一种类 C 的语言,其也有一定的结构,通常一个完整的 CAPL 程序包含以下几个部分:
头文件、全局变量定义、事件处理和自定义函数,不同于 C 语言的是 CAPL 程序没有程序
入口(main 函数)。
1.
头文件
CAPL 中的 includes{}一般存放.cin 文件,在大型的程序开发过程中,采用这种方法可以
提高程序的复用性,使用方法如下:
2.
全局变量定义
CAPL 中的全局变量定义在 variables{}中,作用域为整个程序从开头到结尾,使用方法
如下:
3.
事件处理
CAPL 是面向事件的程序语言,即触发什么样的事件后会有什么样的动作,例如:当按
下按键 a 时,向总线发送一条报文。在 CAPL 中使用关键字 on 来表示某一事件的触发,触
发事件后则执行函数体内的语句,常用的事件有如下几类:
3.1
系统事件
CAPL 中的系统事件包括:on prestart,on prestop 和 on start 等,具体使用需根据实际情
况;
下载后可阅读完整内容,剩余4页未读,立即下载
1372 浏览量
623 浏览量
923 浏览量
1065 浏览量
1714 浏览量
751 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情

汽车测试M哥
- 粉丝: 1175
- 资源: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- PMSM控制和建模(FOC、SVPWM、THIPWM等)_磁场定向控制、空间矢量调制、弱磁、速度/转矩控制、电厂模型、自动校准和
- serverless-angular-user-data:ღˇ◡ˇ(ᵕ꒶̮ᵕෆ联手Anuglar,Netlify和Hasura以获得一些用户数据乐趣ღˇෆ
- 红色动态微立体创业融资计划书PPT模板
- qMedia:一个ComputerCraft程序,可用于在终端上创建动画(如Powerpoint)
- DS3232RTC:用于Maxim Integrated DS3232和DS3231实时时钟的Arduino库
- 工兵
- C-24-Box-Model
- recaptcha:[已取消] Laravel 5的reCAPTCHA验证器
- 链接5G频段wifi 显示saved,然后重复点击3次链接wifi,显示链接失败,ylog和空口抓包 抓包 8581new
- angularTools:尝试通过学习角度来做点事情
- 点击图片展开或者收起代码
- Ajax-Rails-4-AJAX-modal-form-render-JS-response-as-table-row.zip
- 简约农村三层别墅建筑设计.rar
- 魔术8球
- 蓝灰色创意公司简介PPT模板
- ESPHelper:一个使ESP8266上使用WiFi和MQTT变得容易的库
