优化多核静态调度的精确能量模型
需积分: 10 138 浏览量
更新于2024-09-10
收藏 2.37MB PDF 举报
"Accurate energy modeling for many-core static schedules" 是一篇发表在2016年《Microprocessors and Microsystems》期刊上的研究文章,作者包括Simon Holmbacka, Jörg Keller, Patrick Eitschberger和Johan Lilius。文章主要关注的是多核处理器系统中的能量建模,特别是针对静态调度的流应用。
在现代计算机领域,多核处理器系统因其强大的并行处理能力而备受瞩目,提供了巨大的性能潜力。然而,随着硬件结构的复杂度增加,这些系统也面临着一系列挑战,如高操作温度、高昂的电力消耗、由于主动冷却产生的不悦噪音以及移动设备电池寿命的缩短。这些问题的核心在于能源效率的低下。
文章详细探讨了如何构建准确的能量模型来应对这些挑战,特别是对于那些采用静态调度的多核系统。静态调度是一种预先定义任务分配和执行顺序的方法,这种方法在许多应用场景中具有优势,因为它可以提供确定性并简化管理。然而,静态调度在处理能量效率方面可能面临困难,因为它们通常忽视了运行时的动态变化,如任务负载的变化和系统状态的波动。
作者们提出了一种新的方法,旨在更精确地预测和管理多核系统在执行静态调度流应用时的能耗。这种方法可能包括对每个核心的功率特性进行建模,考虑到不同工作负载下的功耗差异,以及考虑系统层面的功耗,例如内存访问和通信开销。通过这样的模型,系统设计者和优化者可以更好地理解能量消耗的来源,并据此制定策略,以提高能源效率,降低运行成本,同时减少对环境的影响。
关键词:功率管理、多核系统、功率模型、静态调度,表明该研究专注于能源效率的提升,特别是在多核架构的静态调度场景下,通过精准的能量模型来优化系统性能和降低能耗。
总结来说,这篇文章是多核计算领域的关键研究,它为理解和优化多核处理器系统在执行静态调度任务时的能源效率提供了一种新方法。通过建立准确的能量模型,开发者能够更有效地管理和减少与高性能计算相关的能源消耗问题,这对于推动绿色计算和可持续发展的信息技术至关重要。
16 S. Holmbacka et al. / Microprocessors and Microsystems 43 (2016) 14–25
on single devices with a fixed deadline and on real-time systems.
In our approach we focus on many-core processors and static
schedules and we consider different deadlines for each schedule.
Zuhravlev et al. [32] give a survey of energy-cognizant schedul-
ing techniques. Many scheduling algorithms are presented and dif-
ferent techniques are explained. They distinguish between DVFS
and DPM-based solutions, thermal management solutions and
asymmetry-aware scheduling. None of the described scheduling al-
gorithms take the switching or shutdown/wakeup overhead into
account like our approach.
While acknowledging that DVFS and DPM are possible energy
savers in data centers [5,14,19] , our work focus on core level gran-
ularity with a smaller time scale and our measurements are based
on the per-core sleep state mechanism rather than suspension to
RAM or CPU hibernation. Aside from the mentioned differences,
none of the previous work deals with latency overhead for both
DVFS and DPM on a practical level from the operating system’s
point of view. Without this information, it is difficult to determine
the additional penalty regarding energy and performance for us-
ing power management on modern multi-core hardware using an
off-the-shelf OS such as Linux.
3. Power distribution and latency of power-saving mechanisms
Power saving techniques in microprocessors are hardware-
software coordinated mechanisms used to scale up or down parts
of the CPU dynamically during runtime. We outline the function-
alities and current implementation in the Linux kernel to display
the obstacles of practically using power management.
3.1. Dynamic Voltage and Frequency Scaling (DVFS)
The DVFS functionality was integrated into microprocessors to
lower the dynamic power dissipation of a CPU by scaling the clock
frequency and the chip voltage. Eq. (1) shows the simple relation
of these characteristics and the dynamic power
P
dynamic
= C · f · V
2
(1)
where C is the effective charging capacitance of the CPU, f is
the clock frequency and V is the CPU supply voltage. Since DVFS
reduces both the frequency and voltage of the chip (which is
squared), the power savings are more significant when used on
high clock frequencies [28,31] .
The relation between frequency and voltage is usually stored
in a hardware specific look-up table from which the OS retrieves
the values as the DVFS functionality is utilized. Since the clock fre-
quency switching involves both hardware and software actions, we
investigated the procedure in more detail to pinpoint the source of
the latency. In a Linux based system the following core procedure
describes how the clock frequency is scaled:
(1) A change in frequency is requested by the user.
(2) A mutex is taken to prevent other threads from changing the
frequency.
(3) Platform-specific routines are called from the generic inter-
face.
(4) The PLL is switched out to a temporary MPLL source.
(5) A safe voltage level for the new clock frequency is selected.
(6) New values for clock divider and PLL are written to registers.
(7) The mutex is given back and the system returns to normal
operation.
3.1.1. DVFS implementations
To adjust the DVFS settings, the Linux kernel uses a frequency
governor [15] to select, during run-time, the most appropriate fre-
quency based on a set of policies. In order to not be affected by the
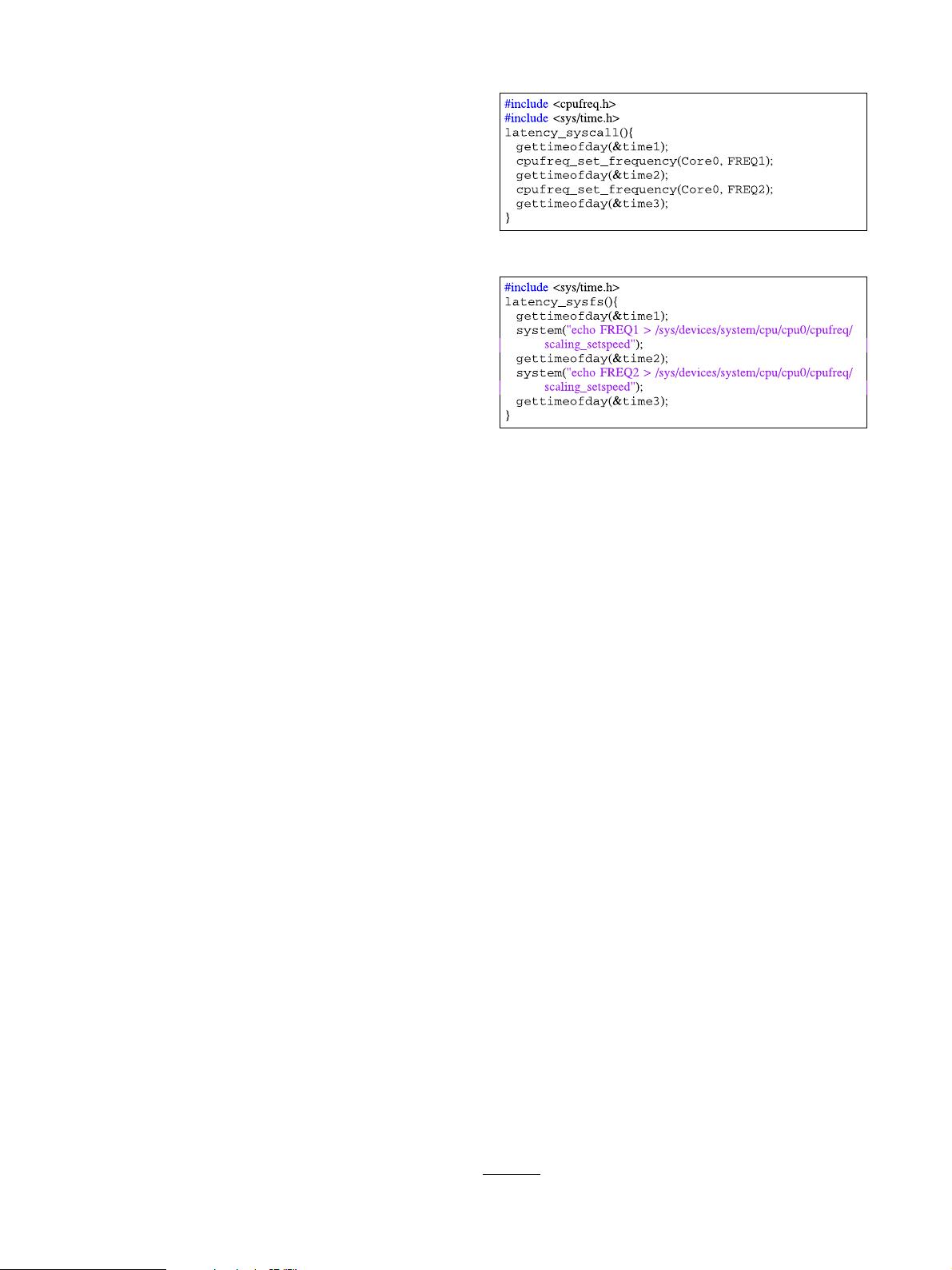
Listing 1. Pseudo code for measuring DVFS latency using system calls.
Listing 2. Pseudo code for measuring DVFS latency using sysfs .
governors, we selected the userspace governor for application-
controlled DVFS. The DVFS functionality can be accessed either by
directly writing to the sysfs interface or by using the system
calls. By using the sysfs , the DVFS procedure includes file man-
agement which is expected to introduce more overhead than call-
ing the kernel headers directly from the application. We studied,
however, both options in order to validate the latency differences
between the user space interface and the system call.
3.1.1.1. System call interface. The system call interface for DVFS un-
der Linux is accessible directly in the Linux kernel. We measured
the elapsed time between issuing the DVFS system call and the
return of the call which indicates a change in clock frequency.
Listing 1 outlines the pseudo code for accessing the DVFS func-
tionality from the system call interface.
3.1.1.2. User space interface. The second option is to use the sysfs
interface for accessing the DVFS functionality from user space. The
CPU clock frequency is altered by writing the frequency to be used
from now on into a sysfs file, which is read and consequently
used to change the frequency. The kernel functionality is not di-
rectly called from the c-program, but file system I/O is required for
both reads and writes to the sysfs filesystem. Listing 2 outlines
an example for the DVFS call via the sysfs interface.
3.1.2. DVFS measurement results
The user space and the kernel space mechanisms were eval-
uated, and the results are presented in this section. Since the
DVFS mechanism is ultimately executed on kernel- and user space
threads, the system should be stressed using different load levels
to evaluate the impact on the response time. For this purpose, we
used spurg-bench [23] . Spurg-bench is a benchmark capa-
ble of generating a defined set of load levels on a set of threads
executing for example floating point multiplications. We gener-
ated load levels in the range [0;90]% using spurg-Bench . Fur-
thermore we generated a load level of 100% using stress
1
since
this benchmark is designed to represent the maximum case CPU
utilization. All experiments were iterated 100 times with differ-
ent frequency hops, and with a timing granularity of microseconds.
1
http://people.seas.harvard.edu/apw/stress/ .
剩余11页未读,继续阅读
2024-11-04 上传
2024-11-04 上传
2024-11-04 上传
2024-11-04 上传

qq_35077624
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
