"基于改进RepVGG的车道线检测算法研究及应用"
版权申诉
196 浏览量
更新于2024-02-22
1
收藏 412KB DOCX 举报
近年来,随着人工智能技术的发展,自动驾驶也处于高速发展阶段。自动驾驶在干线物流、港区矿区、无人配送等任务明确的专业场景,已经逐步实现落地应用。而环境感知作为自动驾驶的重要任务之一,车道线检测作为其中的关键技术,是环境感知的重要组成部分。然而,目前车道线检测算法存在着检测速度较慢、检测精度偏低、检测容易受环境影响等问题。因此,对于车道线检测算法的改进和优化意义重大。
国内外研究车道线检测方法可以分为基于传统方法和基于深度学习方法两种。传统方法主要是利用车道线特征信息如颜色、边缘、宽度等,通过聚类的方式提取车道线,或是根据道路中的车道线特征求解所构造模型参数。传统方法在特定情况下具有较好的识别效果,但其性能在复杂环境下往往不满足使用要求。而基于深度学习的车道线检测方法则分为图像分割、图像分类等两种,且在复杂场景中表现较为出色。
本文基于改进RepVGG网络的车道线检测算法,旨在解决现有车道线检测算法的问题,提高检测速度和精度,降低环境影响。RepVGG是一种新型的网络结构,具有简单、高效的特点,同时在图像分类等任务中表现优异。因此,将其应用于车道线检测领域,有望取得良好的效果。
在本文的研究中,我们首先对RepVGG网络结构进行了详细介绍,包括其网络设计理念、网络结构特点等。接着,我们分析了车道线检测的关键问题,首要是检测速度、检测精度和环境影响。基于这些问题,我们提出了基于改进RepVGG网络的车道线检测算法,并详细阐述了其实现思路和关键技术。
通过对改进RepVGG网络的车道线检测算法进行实验和验证,我们发现在不同场景下,该算法相较于传统方法和原始RepVGG网络有着更好的检测性能。具体来说,我们对比了改进RepVGG网络在检测速度、检测精度和环境影响方面的表现,发现其在各项指标上均取得了较为理想的结果。
总的来说,我们的研究表明基于改进RepVGG网络的车道线检测算法在应对自动驾驶中的环境感知问题上具有潜在的优势和应用前景。不仅如此,该算法的创新和实用性也为自动驾驶技术的进一步发展提供了有力支撑。当然,我们也意识到改进RepVGG网络的车道线检测算法仍存在一些局限性和不足,例如在某些复杂场景下的检测表现等方面。因此,未来需要进一步深化该算法的研究和优化,以期更好地满足自动驾驶技术的需求。
综上所述,我们相信基于改进RepVGG网络的车道线检测算法将在自动驾驶领域发挥重要作用,并为环境感知和安全驾驶做出贡献。期待该算法的进一步发展和推广,为自动驾驶技术的广泛应用提供更为可靠的技术支持。
RepVGG 是 1 种在 VGG
[16]
网络基础上进行改进的主干网络,主体由 3×3 卷积和 ReLU
(rectified linear unit)堆叠组成,训练时为多分支模型结构,推理时为单路模型结构,训
练模型和推理模型之间通过结构重参数化(structural re-parameterization)方式进行转换。
RepVGG 采用 VGG 简洁结构主体,同时在网络中引入 ResNet 中的残差网络。
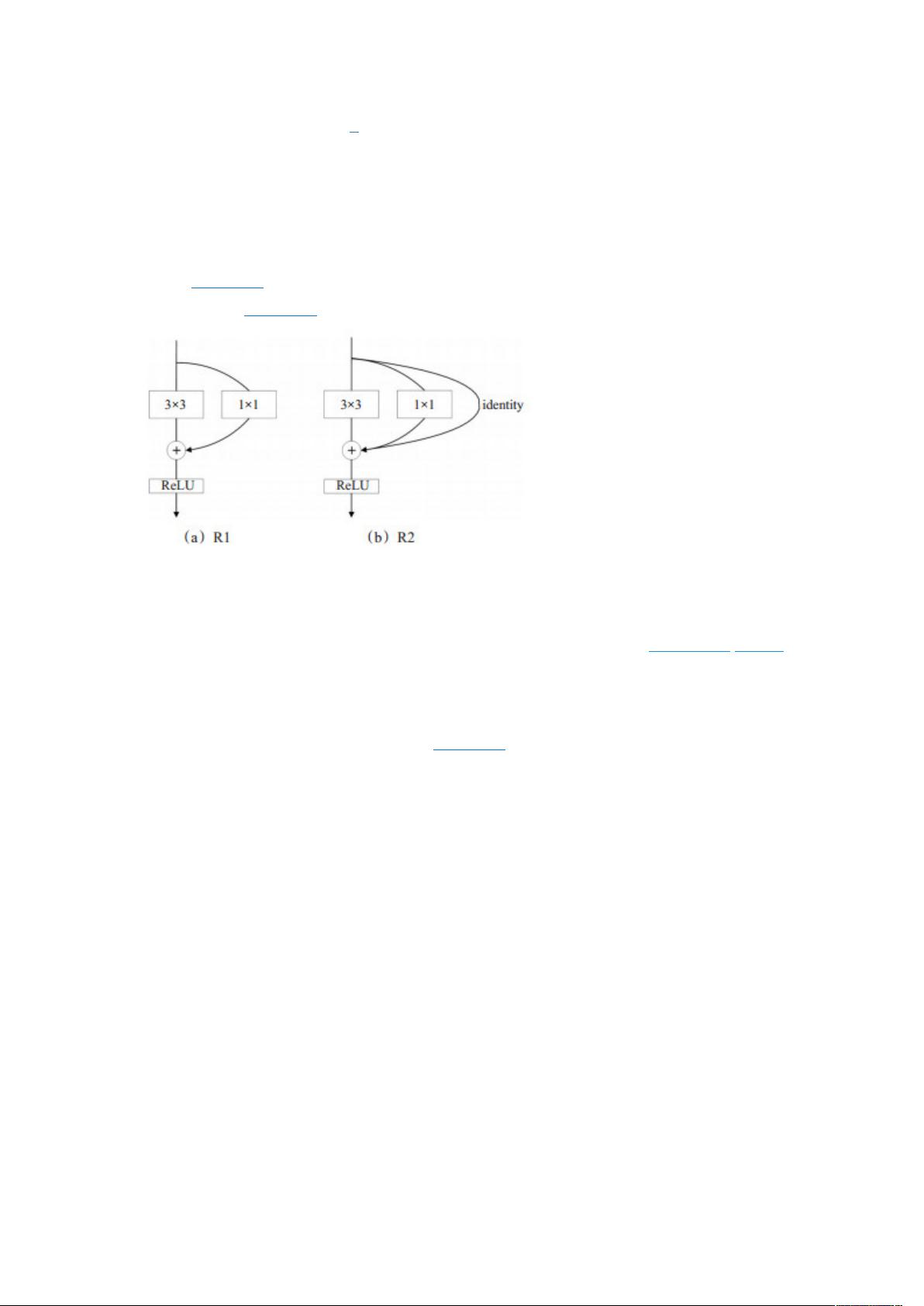
RepVGG 中有 2 种残差结构,分别是包含 1×1 卷积残差分支的残差结构,定义为残差结构
R1,见图 2(a)。以及包含 1×1 卷积残差分支和 identity 残差分支的残差结构,定义为残
差结构 R2,见图 2(b)。
图 2 残差结构
Figure 2. Residual
下载: 全尺寸图片 幻灯片
以残差结构 R1 和 R2 为基础,构建 RepVGG 网络主干。RepVGG 网络训练状态模型
由 5 个阶段组成,每个阶段均以残差结构 R1 为第 1 层,剩余层由残差结构 R2 组成,
RepVGG 网络训练状态模型的部分表达见图 3(a)。
剩余14页未读,继续阅读
2023-02-23 上传
2022-12-01 上传
2022-12-15 上传
2022-06-04 上传
2023-02-23 上传
2022-06-09 上传

罗伯特之技术屋
- 粉丝: 4495
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- RSVP协议的多媒体综合服务机制研究
- 计数器实验——数字电路实验
- VB入门教程.asp.doc(入门级哦)
- 51单片机C语言入门教程.pdf
- 46家各大公司笔试题
- JavaScript DOM 编程艺术.pdf
- Keil uv3快速入门.pdf
- 微控制器 (MCU) 破解秘笈之中文有删节版
- GIVEIO IO驱动的源代码
- 微软应用程序架构指南
- C#串口操作串口操作串口操作
- fsadfdsaarkdffasdfdggdd桌面\C++ STL使用手册.pdfASP.NET新闻、论坛、电子商城、博客源码 很经典的php面向对象教程
- C语言上机南开100题(2009年终结修订word版)
- 软件界面设计及编码标准规范
- 总线的简单项排球介绍
- Gzip压缩.docx
