ROS教程:TF与URDF详解
84 浏览量
更新于2024-08-30
收藏 2.42MB PDF 举报
"ros入门教程(十)– TF & URDF"
ROS中的TF(Transform)系统是用于处理机器人系统中不同坐标系之间变换的关键组件。它允许开发者在多个坐标系之间进行位置和姿态的高效计算,这对于机器人操作、SLAM(Simultaneous Localization and Mapping)以及机械臂运动控制等任务至关重要。
TF树是TF系统的核心,它是一个动态更新的树状数据结构,用于存储和管理所有坐标系(frames)之间的关系。每个坐标系(frame)可以看作是机器人的一个部件或关节,例如链接(link)或关节(joint)。TF树确保了任何两个坐标系之间都存在一条路径,通过一系列连续的变换将它们关联起来。在ROS中,这些变换信息通过`/tf`话题发布,使得各个节点能够实时获取到最新的坐标变换信息。
TF消息格式主要有以下几种:
1. `TransformStamped.msg`:这是一个标准消息类型,包含一个坐标变换,包括从一个坐标系(from_frame)到另一个坐标系(to_frame)的平移(translation)向量和旋转(rotation)四元数。
2. `tf/tfMessage.msg` 和 `tf2_msgs/TFMessage.msg`:这两个消息类型用于在一个消息中携带多个`TransformStamped`,通常用于`/tf`话题中发布多个连续的坐标变换。
在C++中,TF的接口主要包括`tf::TransformBroadcaster`和`tf::TransformListener`两类。`TransformBroadcaster`用于发布坐标变换信息,而`TransformListener`则负责接收和解析这些信息,用于计算坐标变换。
在Python中,TF的接口相对简化,但仍包含`tf.TransformListener`和`tf.TransformBroadcaster`。同时,有一个`tf.transformations`库,提供了一系列的函数,用于进行欧拉角、四元数、旋转矩阵之间的转换,以及平移和旋转的组合计算。
URDF(Unified Robot Description Format)是ROS中用于描述机器人的标准化格式。它是一个XML文件,包含了机器人的物理结构、关节类型、自由度、连杆尺寸、惯性属性等信息。URDF文件可以与TF结合使用,为ROS中的机器人模型提供完整的几何和运动学描述。
在TF中处理URDF模型时,每个链接(link)和关节(joint)都有对应的坐标系,可以通过TF树来表示和操作它们之间的关系。例如,`link`标签用于定义机器人的物理部件,而`joint`标签定义了相邻链接之间的运动关系。通过这种方式,TF可以处理URDF模型中描述的复杂运动学链。
TF和URDF是ROS中构建和操作机器人模型不可或缺的工具,它们共同提供了对机器人结构和运动的清晰描述,并实现了坐标变换的高效计算。学习和掌握这两个概念对于深入理解和开发ROS机器人应用至关重要。
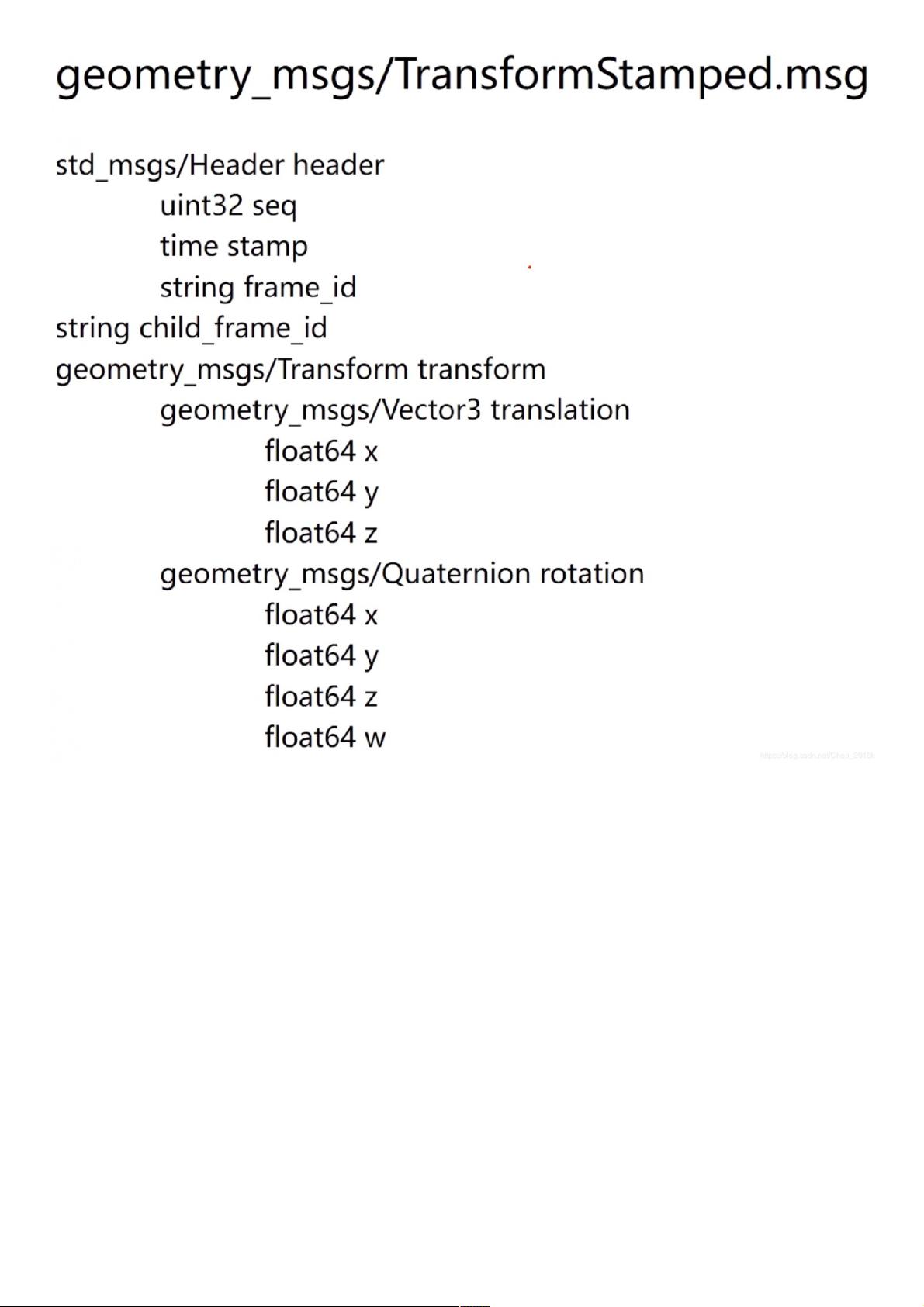
Vector3 translation 表示三维坐标上的平移,Quaternion rotation表示旋转
tf/tfMessage.msg & tf2_msgs/TFMessage.msg
剩余10页未读,继续阅读
2021-03-23 上传
162 浏览量
点击了解资源详情
2019-08-04 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38657835
- 粉丝: 3
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- Visual C++调试基础
- sql server2005基础教程
- Delphi Handbook 2009 All source
- 云计算360度(Cloud Computing)
- Flex体系架构剖析
- WebWork2开发指南PDF
- Globus toolkits 4教程
- C++ programming for Financial Engineers
- beyond software architecture.pdf
- Word处理长文档的技巧
- 毕业设计论文最终定稿
- 计算机外文翻译,文献综述
- 现代网络设计(opnet实验)
- 电脑故障速查参考手册~ 超全 新手必看
- MyEclipse JSF 快速入门中文版.pdf
- 网络工程师考试历年试题解析(2004-2007)
