
SHENOUDA and DAVIDSON: A FRAMEWORK FOR DESIGNING MIMO SYSTEMS WITH DECISION FEEDBACK EQUALIZATION 403
P
sx
y
G
s
DFE
B
Quantizer
^
Transmitt er DFE receiver
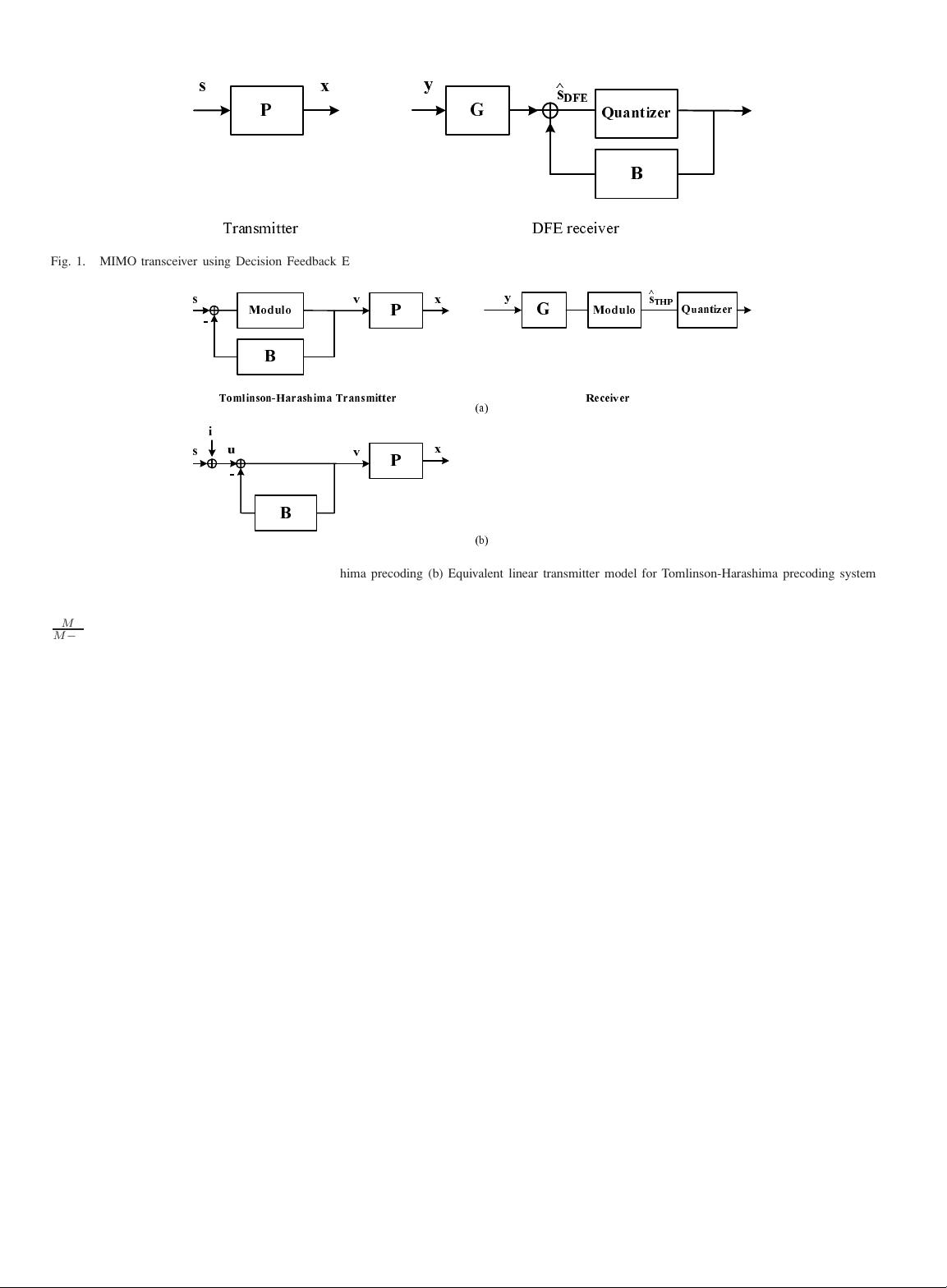
Fig. 1. MIMO transceiver using Decision Feedback Equalization.
y
Quantizer
Modulo
G
Tomlinson-Harashima Transmitter Receiver
s
u
i
P
Modulo
s
vx
-
B
P
v
x
-
B
(a)
(b)
s
THP
^
Fig. 2. (a) MIMO transceiver with Tomlinson-Harashima precoding (b) Equivalent linear transmitter model for Tomlinson-Harashima precoding system
M
M−1
E{|s
k
|
2
} for all k except the first one [9]. For moderate
to large values of M this power increase can be neglected and
the approximation E{vv
H
} = I is often used; e.g., [5], [10]. If
we assume negligible precoding loss, the average transmitted
power constraint can be written as E
v
{x
H
x} = tr(P
H
P) ≤
P
total
.
The vector of received signals in a TH precoded system can
be written as
y = HPC
−1
u + n, (6)
where n is the vector of additive noise which is assumed to
have zero-mean and a covariance matrix E{nn
H
} = R
n
.At
the receiver, the feedforward processing matrix G is used to
obtain an estimate
ˆ
u = GHPC
−1
u + Gn of the modified
data symbols u. Following this linear receive processing step,
the modulo operation is used to obtain
ˆ
s
THP
by eliminating
the effect of the periodic extension of the constellation caused
by the integer vector i. In terms of the modified data symbols,
the error signal
e =
ˆ
u − u = GHPv + G
H
n − Cv (7)
can be used to define a Mean Square Error matrix
E =E
v
{ee
H
} = CC
H
− CP
H
H
H
G
H
− GHPC
H
+ GHPP
H
H
H
G
H
+ GR
n
G
H
. (8)
Assuming negligible precoding loss and that the vector i is
eliminated by the receiver modulo operation (which occurs
with high probability, even at reasonably low SNRs), the error
signal in (7) is equivalent to
ˆ
s
THP
−s. Hence, the mean square
error matrix, E, of the estimate
ˆ
s
THP
of the TH precoding
model is the same as that of the estimate
ˆ
s
DFE
of the DFE
model under the assumption of correct previous decisions in
the DFE.
C. General Model
From (4) and (8), we observe that the MSE matrix of both
systems can be rewritten as:
E = CC
H
− CP
H
H
H
G
H
− GHPC
H
+ GR
y
G
H
, (9)
where R
y
= HPP
H
H
H
+ R
n
. It can also be observed that
linear transceivers are a special subclass of both system models
with the feedback matrix B = 0 (or, equivalently, C = I); see
Figs 1 and 2. Our objective is to jointly design the matrices
G, C and P according to criteria that are functions of E,
subject to a constraint on the average transmitted power.
III. O
PTIMAL FEEDFORWARD AND FEEDBACK MATRICES
We will consider the joint design of the transceiver matrices
G, C and P so as to optimize system design criteria that
are expressed as (increasing) functions of the (logarithm of
the) MSE of each individual data stream, E
ii
, subject to
the transmitted power constraint tr(P
H
P) ≤ P
total
. We will
adopt a three-step design approach. First, an expression for
the optimal feedforward matrix G will be found as a function
of C and P. Second, using the expression for the optimal G,
an expression for the optimal C will be found as a function
of P. Finally, using the obtained expressions for the optimal
G and C, we will design the optimal precoder P.
剩余10页未读,继续阅读

qmj1023
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 51单片机驱动DS1302时钟与LCD1602液晶屏万年历设计
- React 0.14.6版本源码分析与组件实践
- ChatGPT技术解读与应用分析白皮书
- 米-10直升机3D模型图纸下载-3DM格式
- Tsd Music Box v3.02:全面技术项目源码资源包
- 图像隐写技术:小波变换与SVD数字水印的Matlab实现
- PHP图片上传类源码教程及资源下载
- 掌握图像压缩技术:Matlab实现奇异值分解SVD
- Matlab万用表识别数字仪表教程及源码分享
- 三栏科技博客WordPress模板及丰富技术项目源码资源下载
- 【Matlab】图像隐写技术的改进LSB方法源码教程
- 响应式网站模板系列:右侧多级滑动式HTML5模板
- POCS算法超分辨率图像重建Matlab源码教程
- 基于Proteus的51单片机PWM波频率与占空比调整
- 易捷域名查询系统源码分享与学习交流平台
- 图像隐写术:Matlab实现SVD数字水印技术及其源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


