基于Kinect的室内移动机器人SLAM方法研究
需积分: 0 4 浏览量
更新于2024-01-04
收藏 27.99MB PDF 举报
本研究以Kinect作为传感器,针对室内移动机器人SLAM(Simultaneous Localization and Mapping)方法展开研究。随着生活水平的提高,人们对室内服务机器人的需求日益增加,这使得移动机器人自主导航成为其中的重要任务。移动机器人在未知环境中的感知一直是机器人智能化研究的热点和难点,同时也是自主定位与导航的关键。本研究旨在利用Kinect传感器,结合SLAM方法,实现移动机器人在室内环境的自主导航和地图构建,为室内服务机器人的发展提供技术支持。
论文首先对现有的相关研究进行了综述,针对移动机器人在室内环境中的自主导航和地图构建方法进行了梳理和分析,包括基于激光雷达、摄像头、惯性测量单元等传感器的SLAM方法。随后,论文详细介绍了Kinect传感器的工作原理和特点,以及在室内环境中的应用前景,为后续的SLAM方法研究奠定了技术基础。
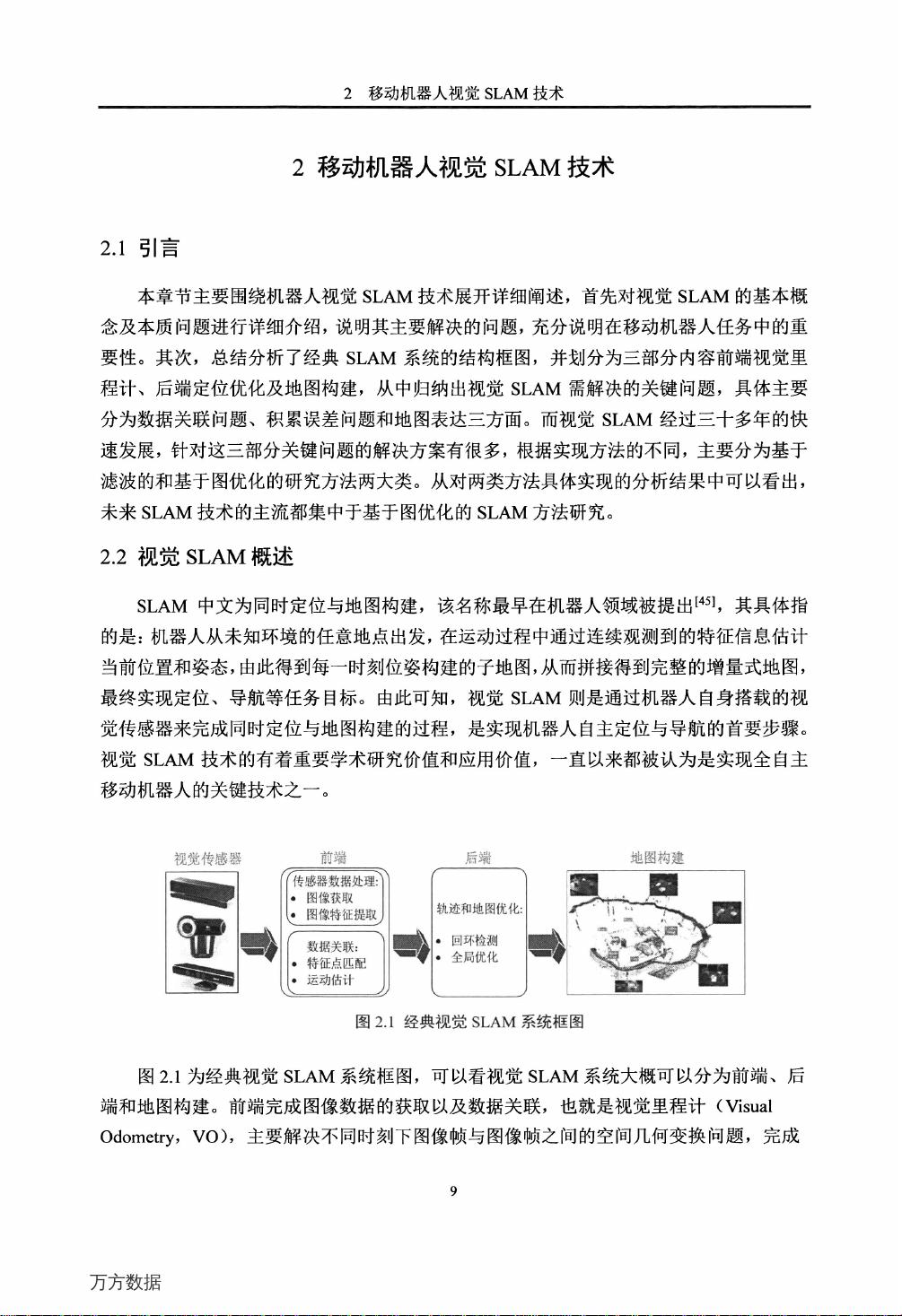
接下来,论文重点介绍了基于Kinect的室内移动机器人SLAM方法的设计与实现。首先,论文详细描述了Kinect传感器在三维环境感知和深度图像获取方面的应用,以及在室内定位和建图中的潜在优势。其次,论文提出了基于Kinect的SLAM方法的整体框架和关键算法,包括传感数据的获取与处理、地图构建与更新、自主定位与路径规划等内容。针对Kinect传感器的数据特点,论文设计了相应的数据融合和滤波算法,提高了SLAM方法的鲁棒性和精度。
随后,论文通过实验证明了基于Kinect的室内移动机器人SLAM方法的有效性和优越性。论文设计了实验场景和测试任务,利用搭建的实验平台和移动机器人进行了一系列的实地测试。实验结果表明,基于Kinect的SLAM方法能够实现移动机器人在室内环境中的自主定位与导航,实现了较高的定位精度和地图构建效果,验证了该方法的可行性和实用性。
最后,论文对基于Kinect的室内移动机器人SLAM方法的研究进行了总结和展望。论文指出了目前研究工作的不足之处,并提出了未来研究的方向和重点,包括Kinect传感器与其他传感器融合的方法、SLAM方法的实时性和扩展性等方面。同时,论文对基于Kinect的SLAM方法在室内移动机器人领域的应用前景进行了展望,指出了该方法在智能家居、服务机器人、无人仓储等领域的潜在应用价值。
综上所述,本研究以Kinect作为传感器,针对室内移动机器人SLAM方法进行了深入的研究和探索,实现了移动机器人在室内环境中的自主导航和地图构建。研究结果对于推动室内服务机器人的发展,提高智能化水平具有一定的理论和实际意义。同时,本研究也为基于Kinect的SLAM方法在其他领域的应用提供了技术支持,具有一定的学术和工程价值。
万方数据

剩余84页未读,继续阅读
2022-08-04 上传
360 浏览量
2022-08-03 上传
点击了解资源详情
114 浏览量
点击了解资源详情
点击了解资源详情
494 浏览量
114 浏览量

以墨健康道
- 粉丝: 34
- 资源: 307
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国计算机技术与软件专业技术资格考试:软件评测师考试大纲
- ajax实战中文版.pdf
- 从头开始对Ubuntu优化
- spring开发指南(夏昕)
- ORACLE9i_优化设计与系统调整
- JTAG调试原理(ARM芯片)
- 第1章 Visual Basic的特点和版本
- KingbaseES入门-Windows
- Oracle DBA应该定期做什么笔记
- 网络工程师PPT 只有第一章 谢谢大家的分享
- 2008年全国计算机等级考试二级公共基础精选120题
- 统计软件SAS教程(李东风)
- 从硬盘安装Linux
- 2007年9月全国计算机等级考试二级C语言笔试试题(含参考答案).doc
- 统一建模语言(UML)参考手册——基本概念
- 2007年4月全国计算机等级考试二级C语言笔试试题(含参考答案)
