基于FIFO技术和FPGA的多通道UART控制器设计与应用
本文档探讨了基于FIFO(First In First Out,先进先出)技术和FPGA(Field Programmable Gate Array,现场可编程门阵列)的多通道UART控制器的设计与实现。在现代复杂控制系统中,通信需求日益增长,传统的串行通信方式已无法满足实时性和效率的要求。因此,作者Shouqian Yu、Lili Yi、Wei Hai Chen和Zhao Jin Wen,来自北京航空航天大学自动化科学与电气工程学院,提出了一个创新的解决方案。
设计方法首先涉及异步FIFO的设计,这种FIFO能够处理不同速率的数据流,并确保数据在发送和接收端之间的顺序一致性。FIFO作为缓冲机制,有效地解决了数据同步问题,减少了系统中子系统间的同步误差,这对于大规模分布式系统尤其重要。此外,设计还包括将UART电路块集成到FPGA中,以实现高效且快速的多通道通信功能。通过使用UART模块,控制器支持在主设备和从设备设置不同波特率的情况下进行通信,增强了系统的灵活性和兼容性。
文章详细介绍了控制器的硬件结构,包括FIFO电路的内部逻辑、接收/发送数据路径以及控制逻辑。这些设计使得控制器能够在高吞吐量环境下稳定工作,同时处理多个数据通道,满足多任务并行通信的需求。通信序列图进一步展示了控制器在实际应用中的操作流程和交互模式,使得用户可以直观地理解其在复杂系统中的应用场景。
这篇论文提供了一种实用的解决方案,不仅提升了系统的通信性能,还简化了集成过程,对于工业自动化、航空电子等领域中的实时控制和通信系统具有显著的价值。通过采用FIFO技术和FPGA平台,该多通道UART控制器为现代控制系统的高效通信设计树立了一个新的标杆。
Implementation of a Multi-channel UART
Controller Based on FIFO Technique and FPGA
Shouqian Yu Lili Yi Weihai Chen Zhaojin Wen
School of Automation Science and Electrical Engineering
Beijing University of Aeronautics & Astronautics
Beijing 100083, China
ysq@buaa.edu.cn buaa_lily@126.com whchenbuaa@126.com junwen1981@126.com
Abstract: To meet modern complex control systems
communication demands, the paper presents a multi-channel
UART controller based on FIFO(First In First Out) technique
and FPGA(Field Programmable Gate Array). The paper
presents design method of asynchronous FIFO and structure of
the controller. This controller is designed with FIFO circuit
block and UART (Universal Asynchronous Receiver Transmitter)
circuit block within FPGA to implement communication in
modern complex control systems quickly and effectively. Form
the communication sequence diagrams, it is easily to know that
this controller can be used to implement communication when
master equipment and slaver equipment are set at different
Baud Rate. It also can be used to reduce synchronization error
between sub-systems in a system with several sub-systems. The
controller is reconfigurable and scalable.
Keywords: FIFO, FPGA, UART
I INTRODUCTION
Today, owing to availability of state-of-the-art
microcontrollers and digital signal processors (DSPs),
complex control algorithms can be easily implemented to
attain the desired system performance. But in actual control
systems, it is difficult to attain the expected result for various
factors affect the control systems such as control algorithms
itself, capability of controllers, capability of implement
equipment and states of control circumstance [1]. Except
those factors, communication parameters of control systems
including Baud Rate, BER (Bit Error Rate) and
synchronization between sub-systems also engender great
effect. In order to improve precision of control system and
make good use of modern control algorithms, we should pay
much more attention on communication in control systems.
In several control systems, UART a kind of serial
communication circuit is used widely. A universal
asynchronous receive/transmit (UART) is an integrated
circuit which plays the most important role in serial
communication. It handles the conversion between serial and
parallel data. Serial communication reduces the distortion of
a signal, therefore makes data transfer between two systems
separated in great distance possible [2].
In some complex systems, communications between the
master controller and slaver controllers are implemented by
serial or parallel port. Parallel communication needs a lot of
multi-bit address bus and data bus and it is only convenient
for short distance transmission. Serial communication is
another way of communication used extensively because of
its simple structure and long transmission distance. But
sometimes a common serial port could not meet
requirements of complex systems with different Baud Rates
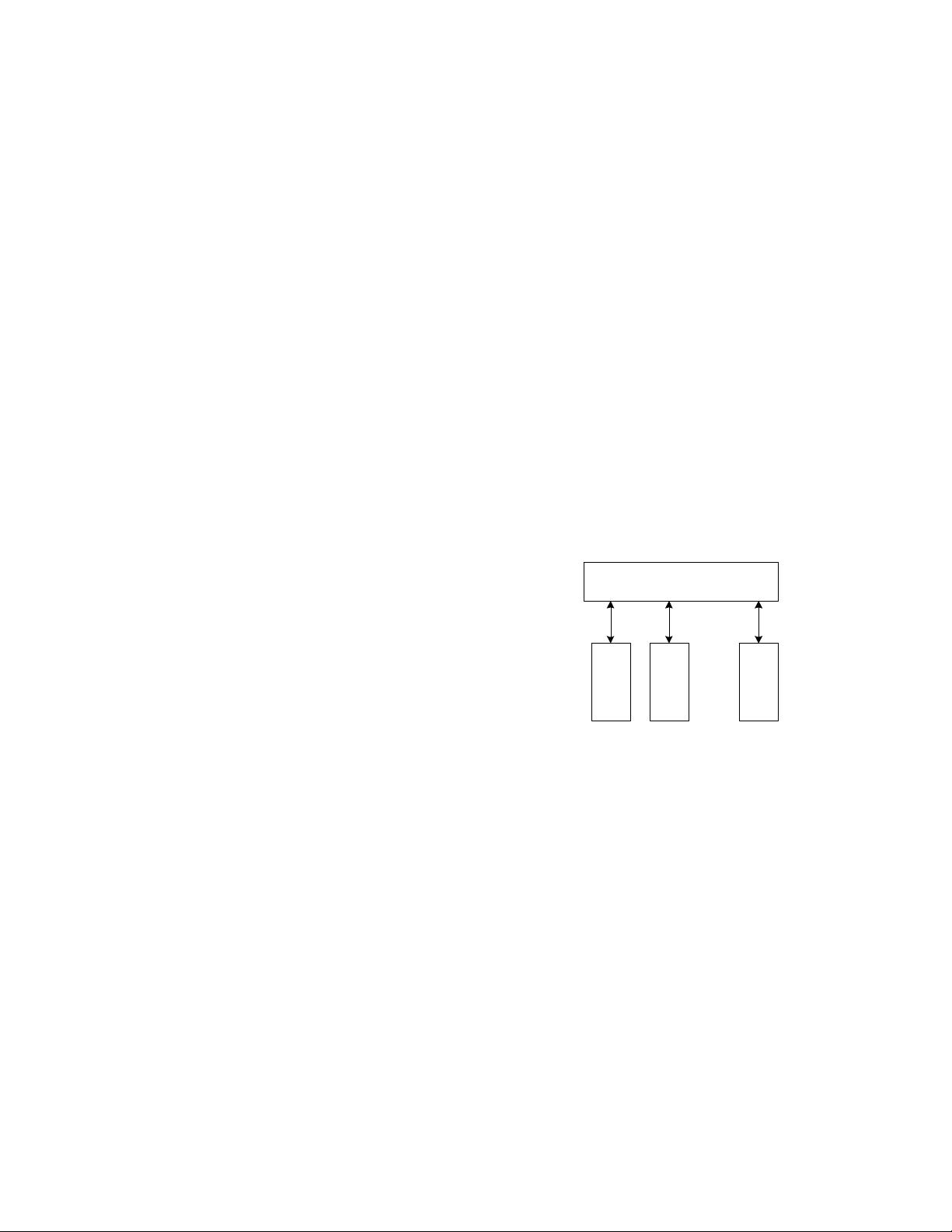
equipments even some special Baud Rate equipments. As
showing in figure 1, in a system, the PC’s Baud Rate is
115200bps and the Ep1 i.e. equipment 1’s Baud Rate is
57600bps, equipment 2’s Baud Rate is 19200bps, and other
equipments are set at 9600bps or other Baud Rates. It is
impossible to implement this multi-Baud Rate
communication system without a special Baud Rate
converter.
In a 6-DOF robot, there are 6 sub-controllers which are all
the same structure to be designed. The PC is used to
implement the control algorithm of the robot and send
control parameters to sub-controllers and sub-controllers are
used to collect feedback signals and send them to the PC.
The PC and sub-controllers communicate with each other on
a RS485 BUS NET. Each sub-controller has a unique
address number and the PC uses this number to identify each
sub-controller. When the PC wants to send data to node 6, it
has to access front 5 nodes, this engenders time delay and
makes performance of the robot’s each DOF not
synchronization. So it reduces the control algorithm’s
precision and brings difficulties in researching of the control
algorithm.
Fig.1. Multi-equipments communication diagram
PC
Ep2Ep1 Epn
……
57600 19200
9600
……
2633
1-4244-0737-0/07/$20.00
c
2007 IEEE
Authorized licensed use limited to: NANJING UNIVERSITY OF SCIENCE AND TECHNOLOGY. Downloaded on March 12, 2009 at 01:49 from IEEE Xplore. Restrictions apply.
下载后可阅读完整内容,剩余5页未读,立即下载
相关推荐





ymlhhb
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
