TI毫米波雷达深度解析:FMCW工作原理与范围测量
毫米波雷达原理深入解析
毫米波雷达是一种利用高频无线电信号进行非接触式距离测量的技术,它在许多领域,如自动驾驶、无人机导航和物联网(IoT)中发挥着关键作用。TI的Sandeep Rao在该PPT中详细介绍了FMCW(频移键控)雷达的工作原理,这是一种广泛应用的雷达技术。
1. 基础FMCW雷达操作:
FMCW雷达通过发射一个频率随时间线性增加的信号,即"chirp"。这种信号的频率随着时间变化,使得接收器可以跟踪信号的频率移动,从而推算出目标的距离。频率对时间的图形(f-t图)是描述chirp的有效工具,其特性包括起始频率(fc),带宽(B),以及持续时间(Tc)。chirp的斜率(S)定义了频率上升的速度。
2. 测量多目标距离:
当雷达面对多个目标时,它能通过检测每个目标反射回来的信号与发送信号之间的差异,来区分并测量它们各自的距离。这涉及计算到达时间差,进而确定各个物体的位置。同时,雷达需要确保两个最接近的目标间仍能保持足够的分辨率,以避免混淆。
3. IF信号与IF带宽概念:
IF (Intermediate Frequency)信号是指接收到的信号经过混频器处理后,将射频信号转换到更易于分析的中间频率范围。IF带宽决定了雷达能够分辨的最小距离或分辨率,因为较大的IF带宽意味着更小的距离变化就能被检测到。理解这些概念对于优化雷达性能至关重要。
4. 范围分辨率:
范围分辨率是雷达能够分辨两个目标之间最小距离的能力。它由公式d_res = c/(2 * B * Tc)给出,其中c是光速,B是带宽,Tc是chirp周期。较高的IF带宽和更短的chirp持续时间将提高范围分辨率,使雷达能够在密集环境中更好地工作。
5. 模块1:距离估计:
在实际应用中,雷达会根据目标反射回来的信号到达时间,结合其自身的发射频率变化,来计算目标距离。通过研究chirp的特性,可以确定雷达能够探测到的最大距离,并确保在多目标情况下能够正确地估计各个物体的位置。
TI毫米波雷达原理讲解PPT深入剖析了FMCW雷达的工作机制,涵盖了从基本操作、多目标距离测量到IF信号和范围分辨率等核心知识点。理解和掌握这些原理,对于设计和优化毫米波雷达系统具有重要意义。
Range Resolution in a radar
• Recall that
– An object at a distance d results in an IF tone of frequency S2d/c
– Two tones can be resolved in frequency as long as the frequency difference Δf > 1/T
• Can you use the above to derive an equation for the range resolution of the radar?
– On what parameters does the range resolution depend ? Chirp Duration, Bandwidth, Slope?
12
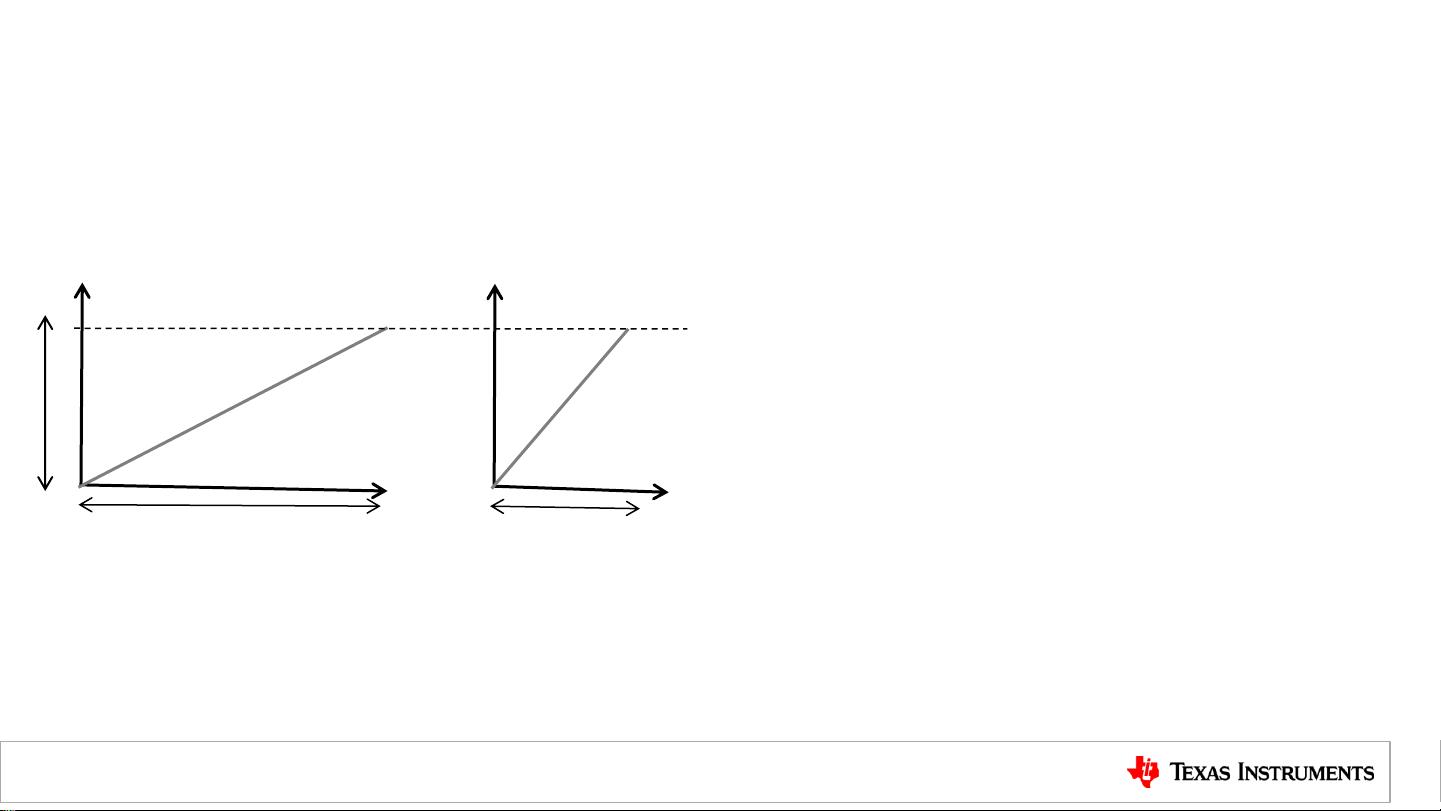
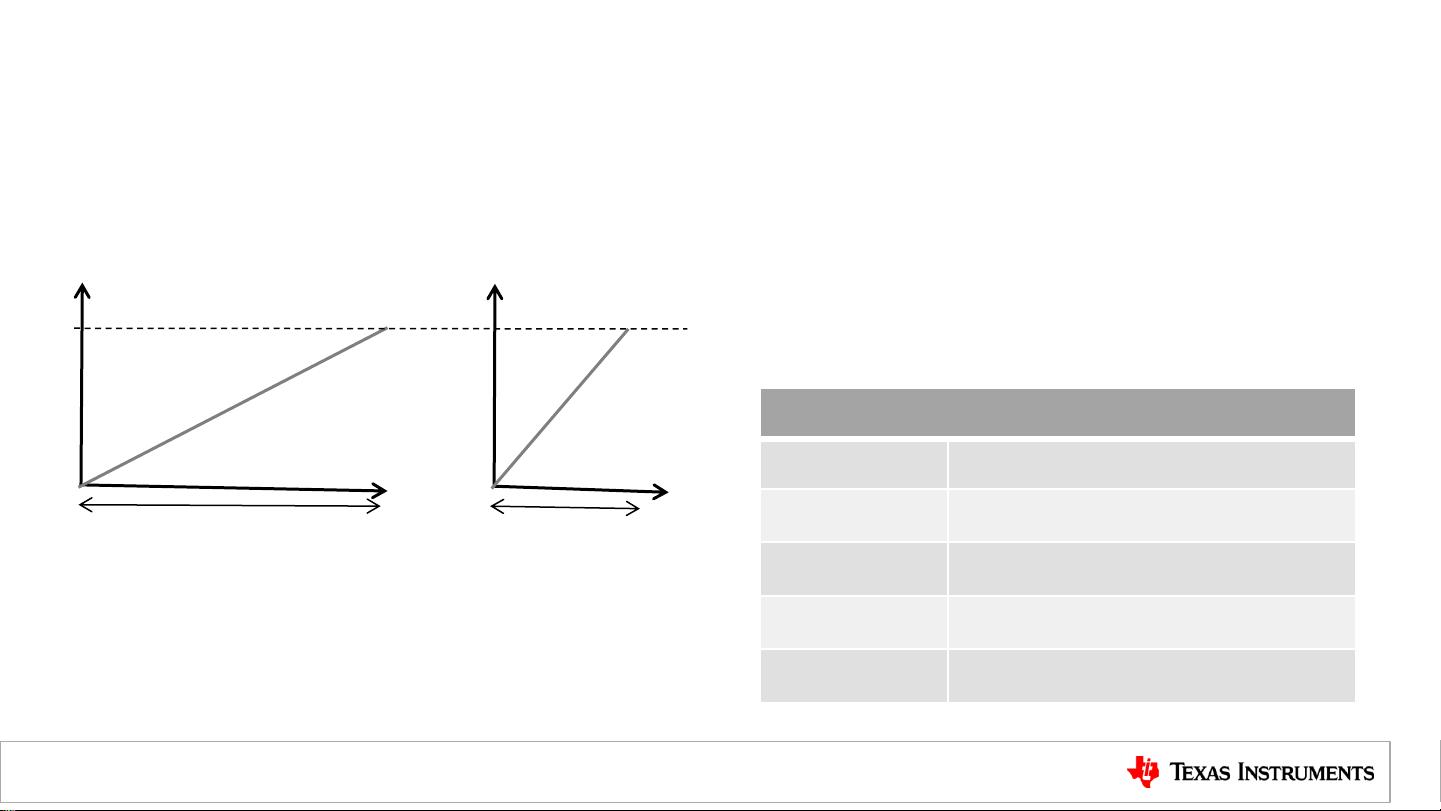
For two objects separated by a distance Δd, the difference in their IF frequencies is given by
Since the observation interval is T
c
, this means that
(since B=ST
c
)
The Range Resolution (d
res
) depends only on the Bandwidth swept by the
chirp
剩余69页未读,继续阅读
1895 浏览量
420 浏览量
426 浏览量
1145 浏览量
1349 浏览量
9206 浏览量

Kamron_l
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 经典J2ME坦克对战游戏:回顾与介绍
- ZAProxy自动化工具集合:提升Web安全测试效率
- 破解Steel Belted Radius 5.3安全验证工具
- Python实现的德文惠斯特游戏—开源项目
- 聚客下载系统:体验极速下载的革命
- 重力与滑动弹球封装的Swift动画库实现
- C语言控制P0口LED点亮状态教程及源码
- VB6中使用SQLite实现列表查询的示例教程
- CMSearch:在CraftMania服务器上快速搜索玩家的Web应用
- 在VB.net中实现Code128条形码绘制教程
- Java SE Swing入门实例分析
- Java编程语言设计课程:自动机的构建与最小化算法实现
- SI9000阻抗计算软件:硬件工程师的高频信号分析利器
- 三大框架整合教程:S2SH初学者快速入门
- PHP后台管理自动化生成工具的使用与资源分享
- C#开发的多线程控制台贪吃蛇游戏源码解析
