AUTOSAR端口驱动规范
版权申诉
20 浏览量
更新于2024-07-18
收藏 1.17MB PDF 举报
"AUTOSAR_SWS_PortDriver.pdf 是一份关于AUTOSAR(AUTomotive Open System ARchitecture,汽车开放系统架构)经典平台的端口驱动器规范文档,主要涉及智能驾驶和车辆标准。该文档由AUTOSAR组织发布并负责更新,是R20-11版本的一部分。文档自2015年以来经历了多次修订,增加了新的枚举值、多核分布功能,并对部分内容进行了修正和澄清。"
在AUTOSAR体系中,端口驱动器(Port Driver)是连接软件组件(SWC,Software Component)与硬件接口的关键部分,它定义了软件与底层硬件交互的方式。文档"Specification of Port Driver"详细阐述了端口驱动的功能、结构以及与MCAL(Microcontroller Abstraction Layer,微控制器抽象层)的关系。
1. **端口驱动器的功能**:
端口驱动器的主要任务是管理硬件接口,实现SWC与硬件之间的数据传输。它处理输入和输出信号,确保数据的正确传递,同时提供错误检测和处理机制。
2. **端口和端口类型**:
根据描述中的“Port_PinDirectionType”,端口驱动可能包含了定义输入和输出方向的枚举类型,这对于控制硬件I/O至关重要。这允许软件组件根据需求配置端口为输入或输出。
3. **MCAL多核分布**:
自R19-11版本起,文档添加了MCAL的多核分布功能,这意味着端口驱动器可以支持多核心微控制器环境下的通信和同步,这对于现代汽车电子系统的高性能和复杂性是必要的。
4. **变更历史**:
从2015年到2020年的更新中,文档经历了多次编辑和改进,包括去除对DEM(Diagnostic Event Manager,诊断事件管理器)的引用,删除“Variants”章节,以及进行各种校正和澄清,确保了文档的准确性和完整性。
5. **与软件组件的交互**:
SWS_Port_00077, SWS_Port_00087等提及的条目可能涉及软件组件如何通过端口驱动器与硬件接口进行交互的具体细节,包括服务调用、数据类型定义和错误处理。
6. **兼容性与标准**:
作为R20-11版本的一部分,此文档遵循AUTOSAR经典平台的标准,保证了与其它AUTOSAR组件的互操作性。
"Specification of Port Driver"文档为开发人员提供了详细指导,帮助他们理解和实现AUTOSAR环境中端口驱动器的功能,以支持智能驾驶和车辆应用的高效、安全的软件设计。
Specification of Port Driver
AUTOSAR CP R20-11
8 of 45 Document ID 40: AUTOSAR_SWS_PortDriver
1 Introduction and functional overview
This specificati on specifies the functionality, API and the configuration of the
AUTOSAR Basic Software module PORT Driver.
This driver specification is applicable for on-chip ports and port pins.
This module shall provide the service for initializing the whole PORT structure of the
microcontroller. Many ports and port pins can be assigned to various functionalities,
e.g.
General purpose I/O
ADC
SPI
SCI
PWM
CAN
LIN
etc
For this reason, there shall be an overall configuration and initialization of this port
structure. The configuration and mode of these port pins is microcontroller and ECU
dependent.
Port initialisation data shall be written to each port as efficiently as possible.
This PORT driver module shall complete the overall configuration and initialisation of
the port structure which is used in the DIO driver module. Therefore, the DIO driver
works on pins and ports which are configured by the PORT driver.
The PORT driver shall be initialised prior to use of the DIO functions. Otherwise DIO
functions will exhibit undefined behaviour.
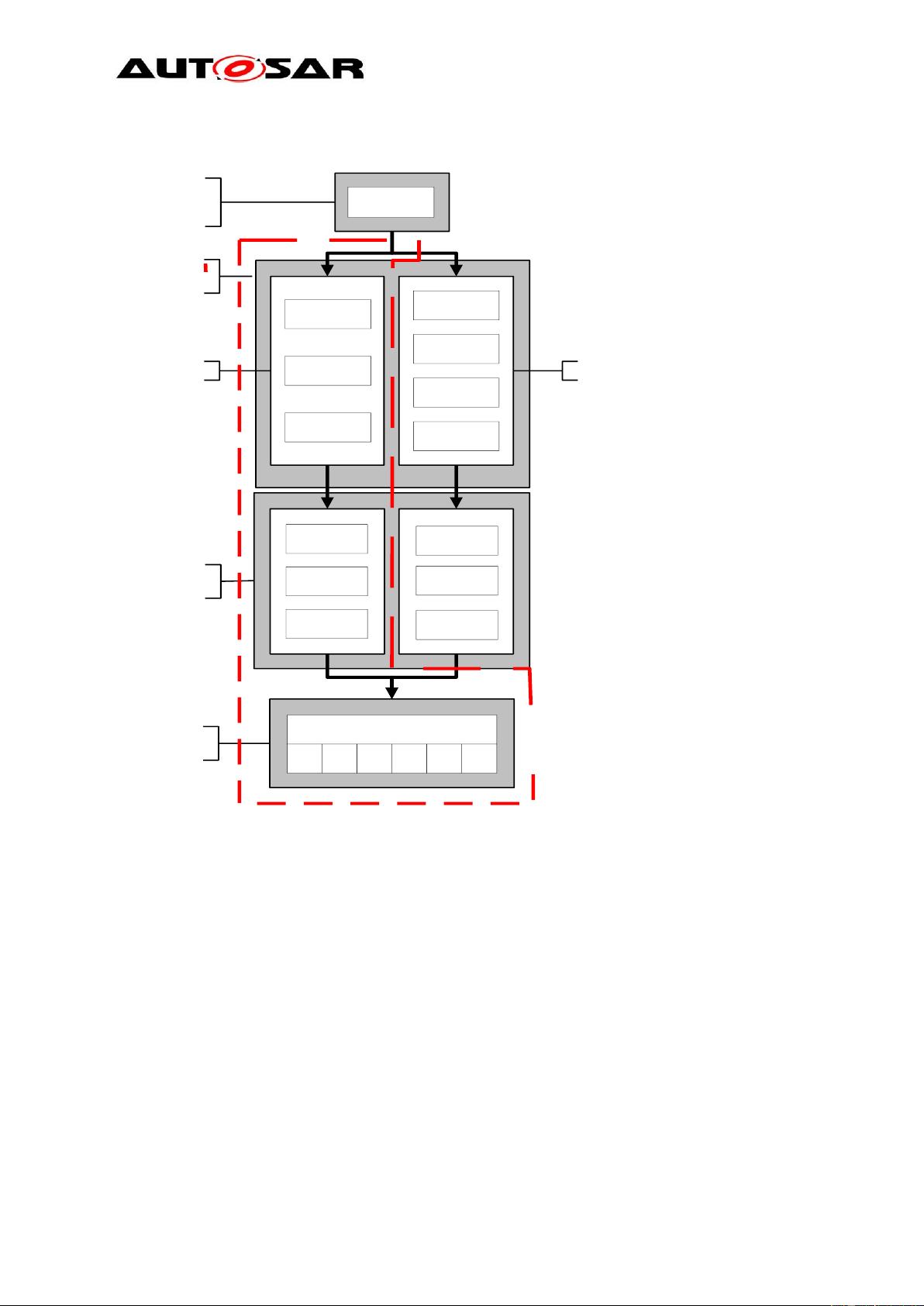
The diagram below identifies the PORT driver functions, and the structure of the
PORT driver and DIO driver within the MCAL software layer.
Driver
Name for
a Port Pin
Name for
Subset of
Adjacent pins
on one port
Name for
a whole
port
DIO Driver
Channel
Channel Group
Port
PORT Driver
Port pin
--
Port
剩余44页未读,继续阅读
445 浏览量
516 浏览量
2021-10-02 上传
2021-08-31 上传
2021-08-31 上传
308 浏览量
2021-08-31 上传
339 浏览量

电动汽车控制与安全
- 粉丝: 275
- 资源: 4186
 我的内容管理
展开
我的内容管理
展开







