MATLAB/SIMULINK在异步电机矢量控制中的建模与仿真
需积分: 0 116 浏览量
更新于2024-09-28
收藏 311KB PDF 举报
本文主要探讨了基于MATLAB/SIMULINK平台实现的异步电机矢量控制系统的建模与仿真。作者何吉利和祝水琴来自浙江工业职业技术学院和宁波大红鹰职业技术学院,他们针对异步电机的复杂特性,利用矢量控制方法将其转化为易于控制的直流电机模型,以便于设计和实施控制器。
矢量控制的核心思想是将异步电机通过坐标变换转换为同步旋转坐标系(MT坐标系),这个过程中电机的非线性、多变量特性得以简化。通过这种转换,控制器可以独立控制电机的定子电流分量,即转矩和磁通,类似于直流电机的控制方式。设计控制器时,通过给定和反馈信号来生成励磁电流和转矩电流,然后通过反变换将这些信号转化为实际的三相电流,以实现变频调速。
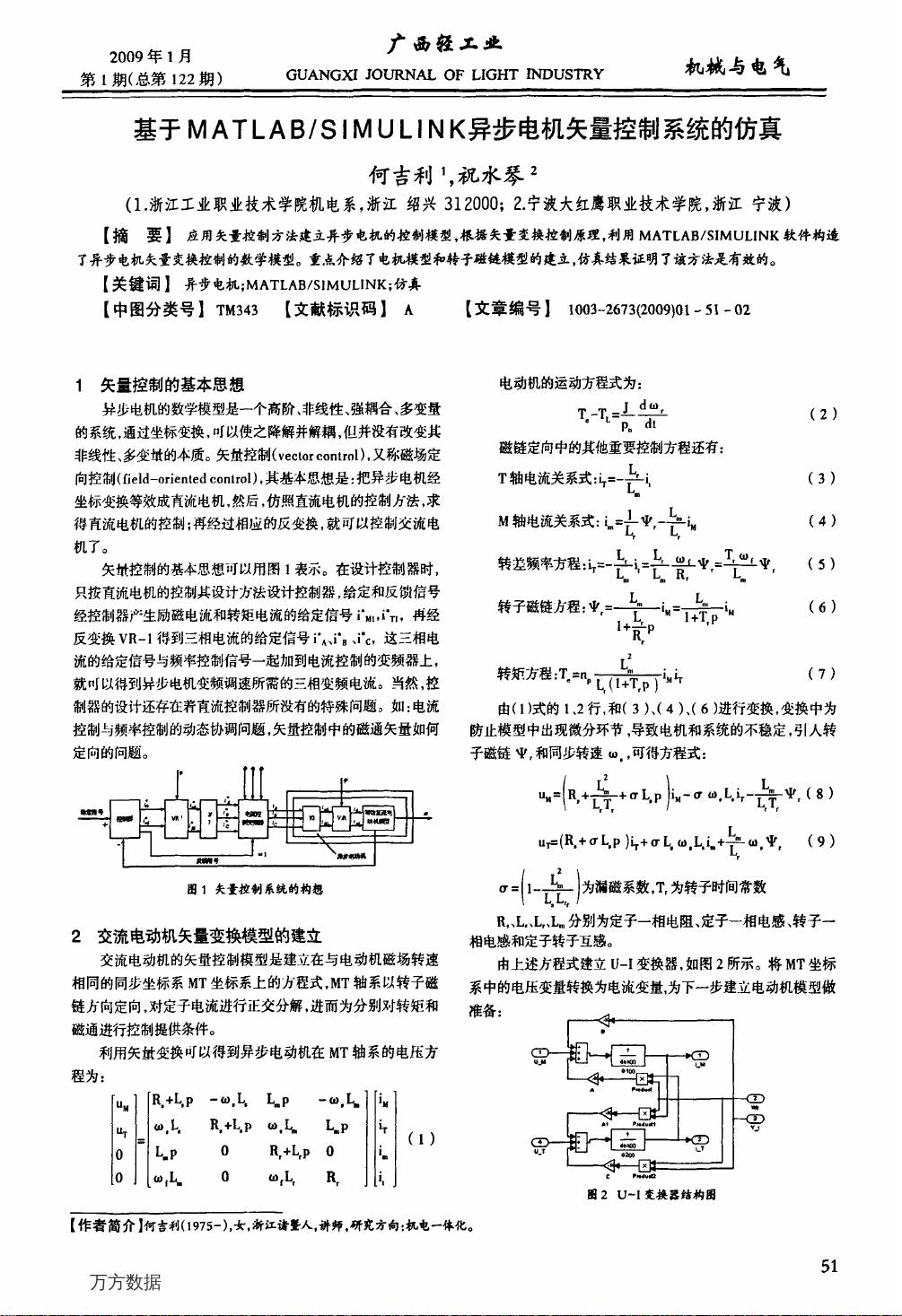
在MATLAB/SIMULINK环境中,作者详细介绍了电机模型和转子磁链模型的构建过程。他们构建的数学模型包括异步电机在MT坐标系下的电压方程,该方程反映了电磁参数对电压的影响以及控制信号的作用。通过仿真验证,这种方法有效证明了矢量控制在实际应用中的可行性。
此外,文章还提到了矢量控制相较于直流电机控制特有的挑战,例如电流控制与频率控制的动态协调问题,以及如何精确地定向磁通矢量。这些技术难题在MATLAB/SIMULINK工具箱的支持下得以解决,体现了该研究的实用性和技术创新。
这篇论文不仅提供了异步电机矢量控制理论的深入理解,也展示了MATLAB/SIMULINK在控制系统设计中的强大功能,对于工程实践中的电机控制具有重要的参考价值。
万方数据
下载后可阅读完整内容,剩余4页未读,立即下载
2021-01-18 上传
2021-07-10 上传
2021-07-10 上传
2021-07-03 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

matlab5000
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
