TL431/432可调精密分流稳压器详解与应用
需积分: 9 77 浏览量
更新于2024-09-10
收藏 363KB PDF 举报
TL431/TL432是一款由Diodes Incorporated生产的可调精确齐纳稳压器,专为需要高稳定性和大电流处理能力(最高可达100mA)的应用设计。这款双端口器件在电路设计中的实用性得益于其广泛的电压调节范围,可以从2.5伏特到36伏特,通过外部分压电阻进行选择。它作为传统431型稳压管的替代品,提供了一种性能改进的选择,尤其在对温度稳定性有较高要求的环境中。
TL431有两个等级可供选择,即A级和B级。A级具有1%的初始精度,而B级则更为精确,具有0.5%的初始精度,适合对电压一致性有严格要求的场合。这两款产品的参考电压在25°C时分别为2.495V±1.0%和2.495V±0.5%,确保了输出电压的准确性。
该稳压器的特点还包括低输出噪声,这有助于保持信号完整性;典型输出阻抗仅为0.2欧姆,这对于信号传输来说是个优点;而且它能够承受的负载电流范围宽广,从1毫安到100毫安,适应不同负载需求。SOT23和SOT25封装形式使得这款芯片尺寸紧凑,同时还提供了绿色封装选项(无铅、无锑且符合RoHS标准),符合环保要求。
TL431/TL432适用于多种应用,如电源管理、电压基准、信号调理等,特别是在需要稳定输出电压的电路设计中,其优秀的温度补偿特性使得其在工业标准环境下表现出色。在设计电路时,工程师可以利用分压网络来调整输出电压,同时要考虑元件的热稳定性和负载电流限制,确保整个系统能在预期的工作条件下稳定运行。
总结来说,TL431/TL432是一款高性能的可调稳压器,凭借其卓越的温度稳定性、宽泛的电压调节范围和低噪音特性,是许多电子设计中的理想选择。在实际应用中,充分理解并合理配置其参数,将有助于提升电路的整体性能和可靠性。
TL431/TL432
ADJUSTABLE PRECISION SHUNT REGULATOR
TL431/432
Document number: DS35050 Rev. 2 - 2
3 of 14
www.diodes.com
September 2010
© Diodes Incorporated
NEW PRODUCT
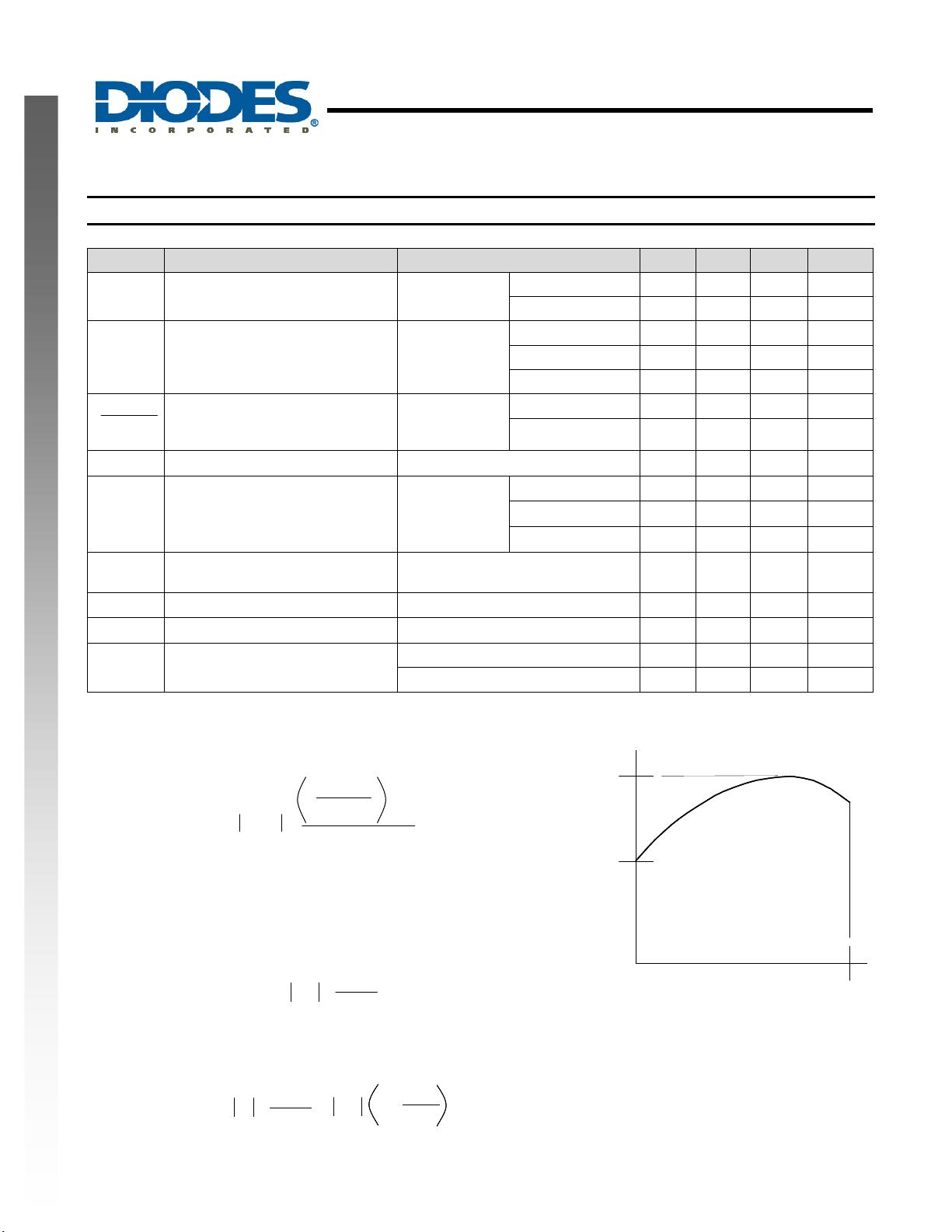
Electrical Characteristics (T
A
= +25°C, unless otherwise noted)
Symbol Parameter Test Conditions Min Typ. Max Unit
V
REF
Reference voltage
V
KA
= V
REF
,
I
KA
= 10mA
TL431A 2.470 2.495 2.520 V
TL431B 2.482 2.495 2.507 V
V
DEV
Deviation of reference voltage over
full temperature range (Note 5)
V
KA
= V
REF
,
I
KA
= 10mA
T
A
= 0 to 70
o
C 6 16 mV
T
A
= -40 to 85
o
C 14 34 mV
T
A
= -40 to 125
o
C 14 34 mV
ΔV
REF
ΔV
KA
Ratio of the change in reference
voltage to the change in cathode
voltage
I
KA
= 10mA
V
KA
= 10V to V
REF
-1.4 -2.7 mV/V
V
KA
= 36V to 10V -1 -2 mV/V
I
REF
Reference input current I
KA
= 10mA, R1 = 10KΩ, R2 = ∞ 1 4
μA
ΔI
REF
I
REF
deviation over full temperature
range (Note 5)
I
KA
= 10mA, R1 =
10KΩ, R2 = ∞
T
A
= 0 to 70
o
C 0.8 1.2
μA
T
A
= -40 to 85
o
C 0.8 2.5
μA
T
A
= -40 to 125
o
C 0.8 2.5
μA
I
KA(MIN)
Minimum cathode current for
regulation
V
KA
= V
REF
0.4 0.7 mA
I
KA(OFF)
Off-state current V
KA
= 36V, V
REF
= 0V 0.05 0.5
μA
|Z
KA
|
Dynamic output impedance (Note 6) V
KA
= V
REF,
f = 0Hz 0.2 0.5 Ω
θ
JA
Thermal Resistance Junction to
Ambient
SOT23 380
o
C/W
SOT25 250
o
C/W
Notes: 5. Deviation of V
DEV
, and ΔI
REF
are defined as the maximum variation of the values over the full temperature range.
The average temperature coefficient of the reference input voltage αV
REF
is defined as:
Where:
T2 – T1 = full temperature change.
αV
REF can be positive or negative depending on whether the slope is
positive or negative.
Notes: 6. The dynamic output impedance, R
Z, is defined as:
When the device is programmed with two external resistors R1 and R2, the dynamic output
impedance of the overall circuit, is defined as:
=
T2 – T1
αV
REF
V
DEV
V
REF
@ 25ºC
X 10
6
ppm/ºC
=
T2 – T1
αV
REF
V
DEV
V
REF
@ 25ºC
X 10
6
ppm/ºC
Vmax
Vmin
T1 T2
V
DEV
= Vmax - Vmin
Temperature
Vmax
Vmin
T1 T2
V
DEV
= Vmax - Vmin
Temperature
=
Z
KA
ΔV
KA
ΔI
KA
=
Z
KA
ΔV
KA
ΔI
KA
=
Z’
ΔV
ΔI
Z
KA
1 +
R1
R2
≈
=
Z’
ΔV
ΔI
=
Z’
ΔV
ΔI
Z
KA
1 +
R1
R2
Z
KA
1 +
R1
R2
≈
剩余13页未读,继续阅读
2010-05-27 上传
2011-08-29 上传
106 浏览量
2022-01-16 上传
2022-01-16 上传
2022-01-16 上传

gushenglin01
- 粉丝: 17
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







