CODESYS运行时系统详解:入门与架构
需积分: 47 71 浏览量
更新于2024-07-18
收藏 1.25MB PDF 举报
"本文档是CoDeSys入门手册的英文版,主要涵盖了CoDeSys的软件架构、RTE(Runtime Environment)的相关设置,适合初学者了解和学习。文档由3S-Smart Software Solutions GmbH制作,包含了从系统整体的Runtime结构到具体组件的功能介绍。"
在CoDeSys编程环境中,Runtime System扮演着核心角色,它是整个系统中的关键组成部分。在整体系统中,Runtime System负责执行编译后的PLC程序,并与硬件进行交互。它的任务包括管理程序的执行流程、处理错误、以及提供与设备通信的接口。
在架构部分,手册详细描述了Runtime System的概述。CoDeSys基于ANSI-C和C++技术,实现了单源代码设计,这使得开发更加灵活且高效。Runtime System提供了紧凑型下载格式,以优化存储空间。此外,手册还提到了错误代码系统,它用于在运行时识别和报告问题。对象句柄是Runtime System中用于标识和操作对象的关键机制,而链接机制则处理不同组件之间的相互调用。
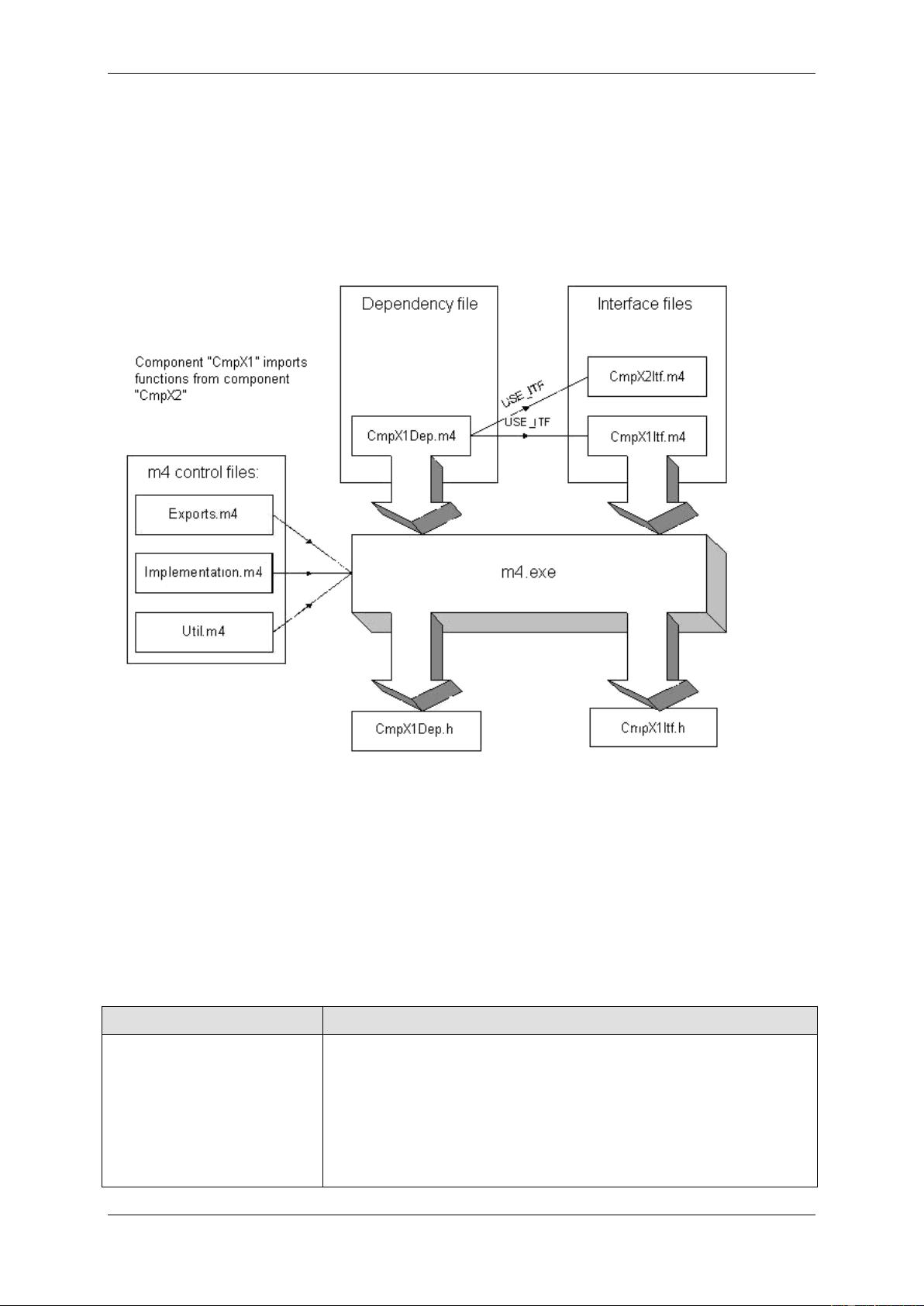
组件接口架构部分,手册详细介绍了调用约定、导出约定和导入约定,这些都是保证不同组件间通信规则的关键。检查函数用于确保接口的正确性,而M4机制则是一种用于描述接口和依赖性的工具。源代码树和目标系统上的文件布局部分,展示了Runtime System的组织结构,包括启动项目、I/O管理、用户管理和可视化组件。
接下来的部分,手册概述了内核组件及其主要功能,这些组件是CoDeSys能够运行应用程序的基础。这些组件在启动、任务调度、中断处理、I/O操作等方面起到关键作用,确保了系统的稳定性和实时性。
这份CoDeSys入门手册是学习和理解这个强大PLC编程平台的宝贵资料,通过深入阅读,读者可以掌握CoDeSys的系统架构,了解其内部工作原理,从而更好地利用它来开发和调试工业自动化项目。
CODESYS Control V3 Manual
3S-Smart Software Solutions GmbH Page 16 of 16
CODESYSControlV3_Manual.doc
tech_doc_e.doc / V1.2
RTS_UI32 ulSizeExternalFunctionTable;
RTS_UI32 ulOffsetRegisterIecFunctionTable;
RTS_UI32 ulSizeRegisterIecFunctionTable;
RTS_UI32 ulOffsetSourceCode;
RTS_UI32 ulSizeSourceCode;
RTS_UI32 ulCrc;
Size in bytes of the external function table
segment
Offset in bytes, where the iec function table
segment begins to link iec functions against the
runtime system
Size in bytes of the external function table
segment
Offset in bytes, where the optional sourcecode
segment begins
Size in bytes of the optional sourcecode segment
RC32 of the complete download stream including
the header with ulCRC written to 0!
Code segment
Code POUs
ApplicationInfo segment:
All names are transmitted 4 byte aligned:
Project name (ASCII string)
Author (ASCII string)
Version (ASCII string)
Description (ASCII string)
Profile (ASCII string)
Date of last change (DATE_AND_TIME)
Application info
Area segment:
List of AREA_INFO
Table of all used areas
Function table:
1. pfCodeInit
2. pfGlobalInit
3. pfGlobalExit
4. pfReloc
5. pfDownloadCode
6. pfTargetInfo
Function table to link to runtime
External Function table:
List of EXT_REF_INFO (4 Byte aligned for the
next entry!)
Table of external references
IEC Function table:
List of FUNCTION_INFO with following name of
the IEC function at the end (4 Byte aligned for the
next entry!)
Table of IEC functions that can be called from C
Source code segment:
Actually not used
Optional source code segment for the source
code of the used project
CRC CRC over the complete download stream
The code POUs can be relocated in CODESYS, if the address of the Data Area is fix and is known.
This is the main requirement to execute the plc program in flash.


剩余194页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-09-20 上传
2012-10-20 上传
2021-09-11 上传
2021-10-15 上传
2012-02-23 上传
2014-07-03 上传

Jeff-Hu
- 粉丝: 7
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







