单级倒立摆的LQR控制理论与稳定性分析
"本文介绍了单级倒立摆的线性最优二次型(LQR)稳定控制方法,通过理论和实际结合的仿真验证,展示了LQR控制的有效性。倒立摆作为一个控制学中的经典问题,因其非线性、不稳定特性,成为了检验控制策略的重要平台。文章回顾了倒立摆控制系统的历史,指出其在火箭飞行控制、双足机器人和伺服转台等领域的重要应用。"
在控制理论中,倒立摆是一个极具挑战性的系统,因为它需要对一个高度不稳定、多变量且非线性的系统进行精确控制。LQR控制是一种基于二次型性能指标的最优控制策略,它通过最小化系统状态的加权平方和来优化控制性能。在单级倒立摆的LQR稳定控制中,首先需要对倒立摆进行建模。
倒立摆的工作原理通常涉及一个摆杆连接到一个可移动的小车上,通过伺服机构和传感器构成闭环控制系统。在理想情况下,忽略阻力和摩擦,可以将摆杆简化为一个质点,小车和摆杆分别具有各自的质量和惯量。通过对系统进行受力分析,可以建立倒立摆的数学模型,通常会得到一组非线性动力学方程。
为了应用LQR控制,首先要对倒立摆的非线性模型进行线性化,这通常在平衡点附近进行。线性化后的模型可以表示为状态空间形式,然后设计一个状态反馈控制器,该控制器的增益矩阵由LQR算法计算得出。LQR算法考虑了系统状态的权重,通过求解阿尔卡塔拉茨基-利瓦伊森伯格(Algebraic Riccati Equation, ARE)得到最优控制增益。
在实际应用中,LQR控制器能够提供良好的控制性能,但需要注意到控制信号可能超出物理限制,例如电机的扭矩限制。因此,通常需要对控制信号进行限幅,以适应实际系统的硬件能力。LQR控制的优势在于其算法简单、鲁棒性较好,且能够确保系统的稳定性,适用于实时性要求高的控制任务。
仿真结果表明,采用LQR控制策略能够有效地稳定单级倒立摆,实现良好的控制效果。这不仅验证了线性化处理的适用性,也证明了LQR方法在处理非线性、不稳定系统时的有效性。倒立摆作为控制理论的实验平台,其控制方法的成功应用对于推动新型控制理论和技术的发展具有重要意义。
l 摆杆转动轴心到杆质心的长度
I 摆杆惯量
F 加在小车上的力
x 小车位置
φ 摆杆与垂直向上方向的夹角
2、建立倒立摆的数学模型
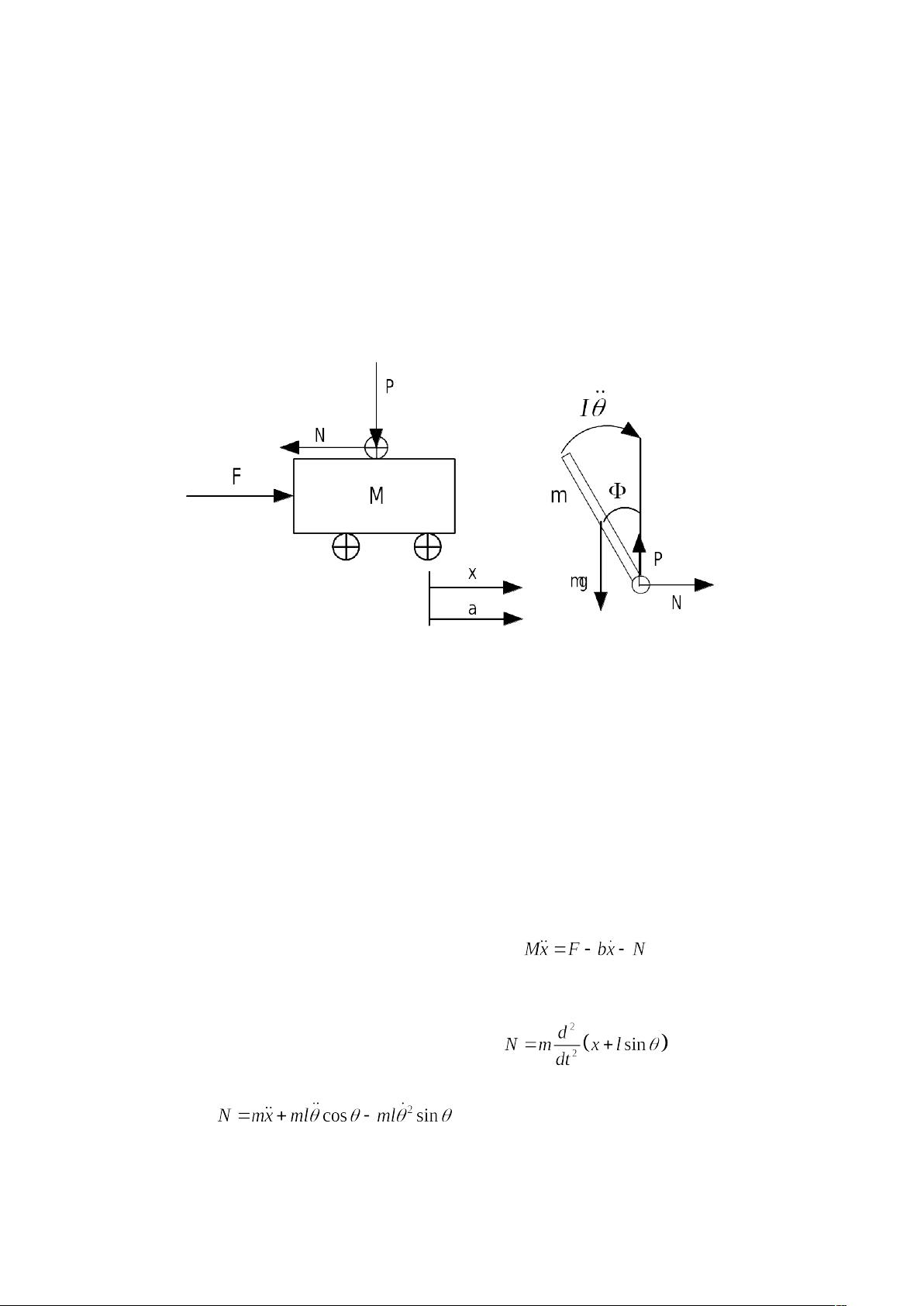
图3 倒立摆与小车的受力分析
图 3 是倒立摆小车和摆杆受力分析图。其中 F 为加在小车上的力,M 为小
车的质量,m 为摆杆质量,I 为摆杆惯性,l 为摆杆长度,x 为小车位置,θ 为摆
杆与垂直方向的夹角,b 为小车摩擦力,T 为采样周期,N 和 P 为摆杆相互作用
力的水平和垂直方向上的分量。
注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因
而矢量方向定义如图所示,图示方向为矢量正方向。
分析小车水平方向所受的合力,可以得到以下方程:
(1)
由摆杆水平方向的受力进行分析可以得到下面等式:
(2)
即:
为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,
剩余12页未读,继续阅读
相关推荐




xiaopingtou
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 武汉大学数字图像处理课程课件精要
- 搭建个性化知识付费平台——Laravel开发MeEdu教程
- SSD7练习7完整解答指南
- Android中文API合集第三版:开发者必备指南
- Python测试自动化实践:深入理解更多测试案例
- 中国风室内装饰网站模板设计发布
- Android情景模式中音量定时控制与铃声设置技巧
- 温度城市的TypeScript实践应用
- 新版高通QPST刷机工具下载支持高通CPU
- C++实现24点问题求解的源代码
- 核电厂水处理系统的自动化控制解决方案
- 自定义进度条组件AMProgressView用于统计与下载进度展示
- 中国古典红木家具网页模板免费下载
- CSS定位技术之Position-master解析
- 复选框状态持久化及其日期同步技术
- Winform版HTML编辑器:强大功能与广泛适用性
