PLC控制步进电机:简单编程实例
需积分: 1 74 浏览量
更新于2024-09-10
收藏 207KB DOC 举报
"移动开发资料"
本文主要讨论的是在PLC编程中,特别是与步进电机控制相关的技术。首先,PLC(可编程逻辑控制器)中的Y0和Y1可以被认为是同时输出PLSY指令,虽然实际上它们在同扫描周期内执行,而不是真正意义上的同时。这两条指令用于设置高速输出,其标志独立,互不影响。然而,不能同时对同一个输出点执行两条PLSY指令。
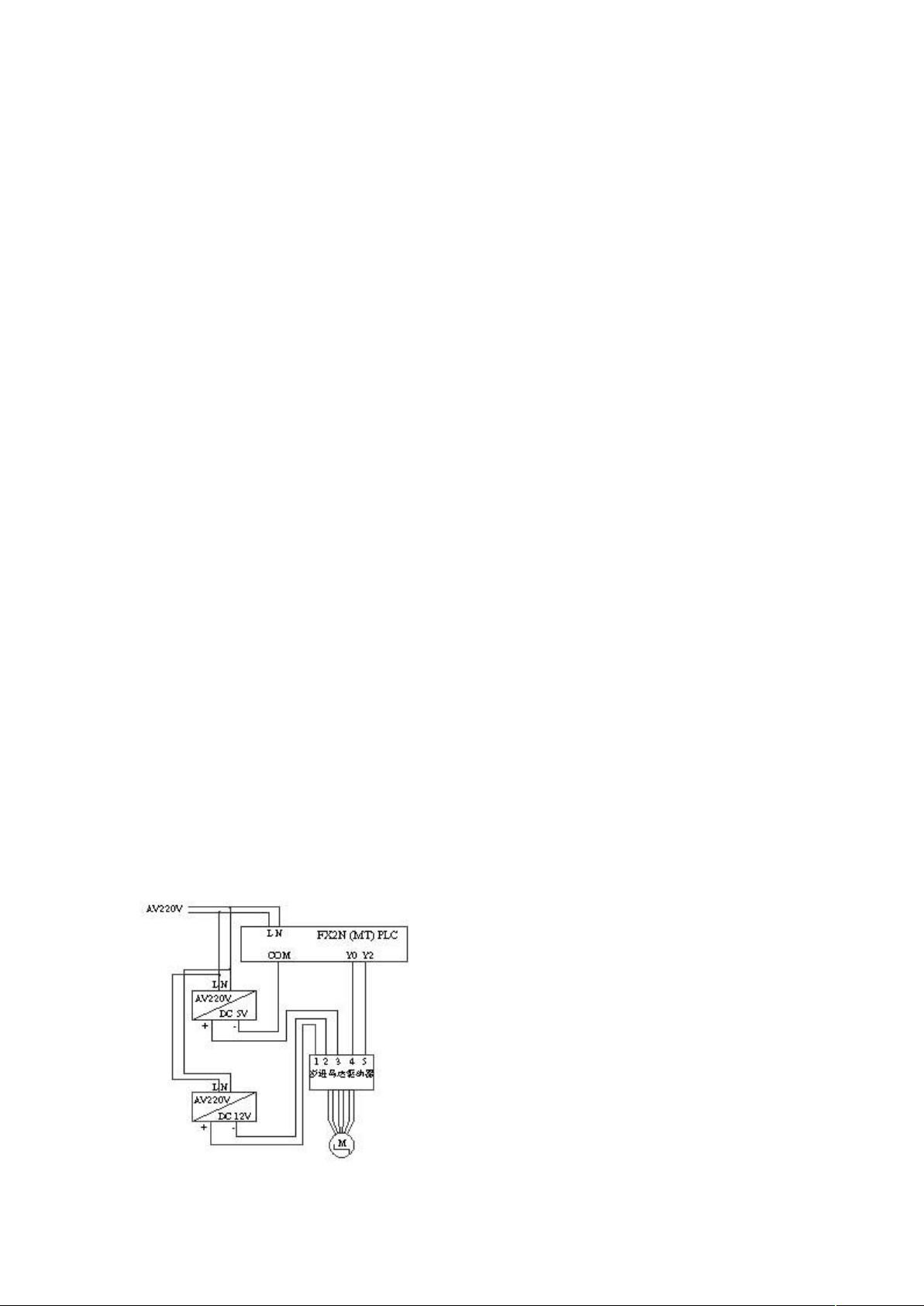
在步进电机的控制应用中,经常遇到如何用PLC来控制步进电机的问题。例如,步进电机驱动器通常有电源输入(1和2)、控制电源正极(3)、脉冲输入(4)以及方向控制(5)。若步进电机的步距角为1.8度,驱动器支持细分功能,并采用半步运行模式,那么每毫米的移动需要输出80个脉冲。如果丝杆螺距为5mm,电机旋转一周,工件移动5mm,因此PLC需要输出400个脉冲。
针对一个具体的需求,比如在人机界面上输入工件目标位置后,工件自动移动到设定位置。程序通过比较设定位置(D200)和实际位置(D202)的差值(D204)来决定电机的正反转。如果设定值大于实际值,设置Y2为正转,反之则反转。然后,使用PLSM和PLSY指令来生成所需数量的脉冲,根据步距角和实际移动距离计算出脉冲数。在本例中,PLSY指令用于以特定频率(如1000Hz)输出脉冲。
需要注意的是,PLSY指令的应用有一些限制,如只能指定Y000或Y001作为输出点,不能选择Y003。此外,每个脉冲对应的是电机的一个步距角,对于步距角为0.9度的电机,编写PLSY指令时应考虑这一因素。例如,若要使电机旋转60度,错误的指令可能是PLSYK3000K240Y3,因为输出点Y3不正确。正确的指令应该是基于电机步距角和需要转动的角度来计算脉冲数。
总结来说,移动开发资料中涉及的PLC编程和步进电机控制是一个复杂但重要的主题。正确理解和应用PLSY指令,以及理解步进电机的工作原理和参数,是实现精确自动化控制的关键。在实际应用中,还需要考虑电机的性能、驱动器的特性和系统的需求,进行适当的计算和编程。
首先用 MT 晶体管系列的,
其次,最好不用 PLSY 指令,使用 DIVR 指令,可重复使用.
对于脉冲输出来控制伺服电机,台达 PLC 完全可以胜任,而且已经有很多实际应
用,PLSY/PLSR 指令是脉冲输出控制指令,DRVI/DRVA/ZRN 是专门定位指令,
还有 PWM 脉宽调制指令都可以使用,其中 PLSY 是直接脉冲输出,PLSR 是可以
设置加减速时间脉冲输出指令.
前几日改造设备,原设备用的 PLC 是三菱 FX1N 的,运动机构用的是安川的伺
服电机。
原程序中控制电机发脉冲的指令为 PLSY,起初我没有在意,就没有换用别的指
令,但是当我在触摸屏上加上显示伺服当前位置时,发现了问题。
显示伺服电机通过丝杠带动的工作台的当前位置,我用了 PLC 自带的 D8140
寄存器中的数值除以变比得到,但当我实际调试时,才发现,电机正转,该值
增加,没有错,但当电机反转,工作台往回走时,显示值还是增加,这时我的
头就大了,这样根本就不能真实的显示工作台的位置了呀。但是我以前做过类
似的系统,显示的没有错啊!我冷静的思考比较了一下,想到应该是 PLSY 这
条指令的问题。想到这,我换用了 DRVA 指令,结果一调试,这回没有错了。
后来我想到,D8140 中存放的是 PLC 发送的脉冲数,而 PLSY 指令发送脉冲只
有正值,没有负值,电机旋转方向是靠控制电机正反转来决定的。而 DRVA 指
令控制电机的正反转不是人为定义的,而是靠给定的脉冲值,这时脉冲值是有
正负的,所以 D8140 中的脉冲数会相应的增加或减少,这时想在屏幕上监视
的结果才出来了。
用 PLSY 指令控制步进电机
经常看到有的工控朋友问起用 PLC 控制步进马达的问题,在这里我举个最简单
的例子,只能提供思路,更深入的研究就靠大家自己了。
剩余11页未读,继续阅读
150 浏览量
2021-11-28 上传
2021-03-16 上传
2015-08-07 上传
2010-06-24 上传
2020-12-26 上传
1168 浏览量
196 浏览量

dhj_dhj
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







