工业机器人抓取手臂结构与液压系统设计解析
版权申诉
50 浏览量
更新于2024-06-23
收藏 545KB DOC 举报
"本文档详细介绍了工业机器人抓取手臂的结构设计,涵盖了从前期研究到具体结构组件的各个方面,包括前言、手部结构、腕部结构、臂部结构、液压系统设计以及结束语。"
在前言部分,文档首先简述了工业机器人的发展历程和其在各领域的广泛应用。工业机器人由操作机、控制器、伺服驱动系统和传感器等核心部件组成,其目的是为了自动化执行任务,减轻人类劳动负担。
手部结构部分讨论了设计手部时需要考虑的问题,如驱动力计算、钳爪定位误差分析等。对于两支点回转式钳爪,文档深入探讨了定位误差的分析,这对于确保精确抓取至关重要。
腕部结构章节介绍了腕部的不同结构形式以及驱动力矩的计算,腕部是连接手部和臂部的关键部分,它的设计直接影响机器人的灵活性和作业范围。
臂部结构部分详细阐述了手臂直线运动机构,包括手臂伸缩、导向装置、升降运动以及相关的驱动力计算。这部分内容对理解机器人的运动性能和负载能力非常关键。
液压系统设计章节深入剖析了液压系统的构成,包括压力、速度和方向控制回路,以及机械手液压系统的具体应用。这部分还涉及了油缸选择、油泵功率计算等内容,这些都是确保液压系统有效运行的核心要素。
结束语部分对整个设计进行了总结,强调了工业机器人抓取手臂结构设计的重要性及其在实际应用中的价值。
整个文档不仅提供了理论知识,还通过具体的计算和实例展示了工业机器人抓取手臂设计的实际操作步骤,为读者提供了全面而深入的理解。

2 手部结构
2.1 概述
手部是机械手直接用于抓取和握紧工件或夹持专用工具进行操作的部件,它具有模
仿人手的功能,并安装于机械手手臂的前端。手部结构及型式根据它的使用场合和被夹
持工件的形状,尺寸,重量,材质以及被抓取部位等的不同而设计各种类型的手部结构,
它一般可分为钳爪式,气吸式,电磁式和其他型式。钳爪式手部结构由手指和传力机构
组成。其传力机构形式比较多,如滑槽杠杆式、连杆杠杆式、斜楔杠杆式、齿轮齿条式、
弹簧杠杆式……等,这里采用滑槽杠杆式。
2.2 设计时应考虑的几个问题
①应具有足够的握力(即夹紧力)
在确定手指的握力时,除考虑工件重量外,还应考虑在传送或操作过程中所产生的
惯性力和振动,以保证工件不致产生松动或脱落。
②手指间应有一定的开闭角
两个手指张开与闭合的两个极限位置所夹的角度称为手指的开闭角。手指的开闭角
保证工件能顺利进入或脱开。若夹持不同直径的工件,应按最大直径的工件考虑。
③应保证工件的准确定位
为使手指和被夹持工件保持准确的相对位置,必须根据被抓取工件的形状,选择相
应的手指形状。例如圆柱形工件采用带‘V’形面的手指,以便自动定心。
④应具有足够的强度和刚度
手指除受到被夹持工件的反作用力外,还受到机械手在运动过程中所产生的惯性力
和振动的影响,要求具有足够的强度和刚度以防止折断或弯曲变形,但应尽量使结构简
单紧凑,自重轻。
⑤应考虑被抓取对象的要求
应根据抓取工件的形状、抓取部位和抓取数量的不同,来设计和确定手指的形状。
2.3 驱动力的计算
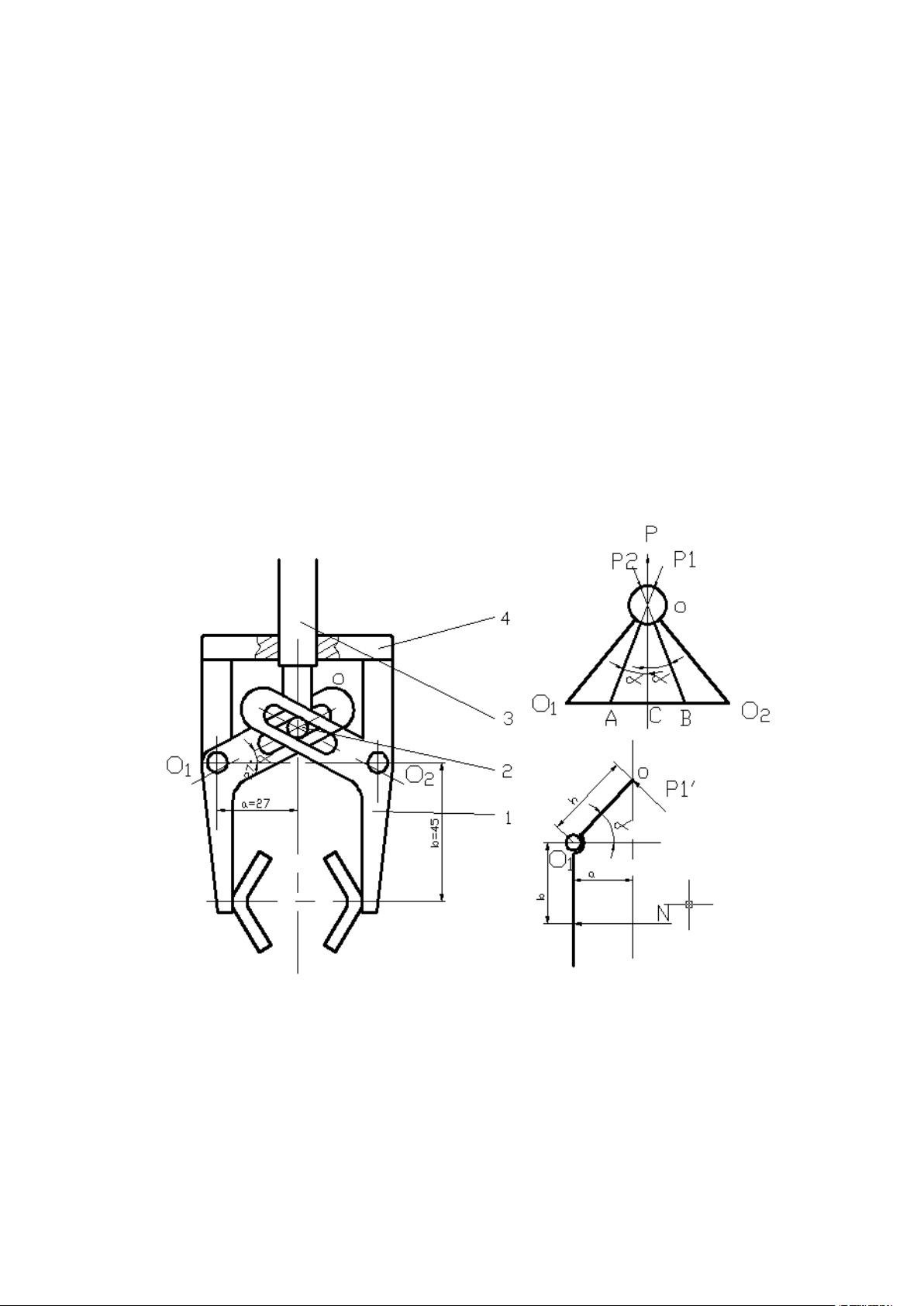
如图 1 所示为滑槽式手部结构。在拉杆 3 作用下销轴 2 向上的拉力为 P,并通过销
轴中心 O 点,两手指 1 的滑槽对销轴的反作用力为 P1、P2,其力的方向垂直于滑槽中心
线 OO1 和 OO2 并指向 O 点,P1 和 P2 的延长线交 O1O2 于 A 及 B,由于△O1OA 和
△O2OA 均为直角三角形,故∠AOC=∠BOC=α。根据销轴的力平衡条件,即
∑Fx=0,P1=P2;∑Fy=0
剩余35页未读,继续阅读
2023-07-12 上传
2021-11-26 上传
2021-10-29 上传
2021-10-06 上传
2021-09-16 上传
108 浏览量

老帽爬新坡
- 粉丝: 98
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- rt-thread-code-stm32f407-atk-explorer.rar探索者 STM32F407 是正点原子
- Winsoft WebView v6.6 for Delphi & CB
- nacos-server-2.3.0压缩包
- EMS Advanced Data Export 4.17.0.5 D12.rar
- 帕金森患者数据帕金森患者数据
- DOCXReadWrite D11 D12.7z
- Easy Save - The Complete Save Data Serializer System 3.5.6
- PyCharm安装教程
- 哈工大-操作系统-考试
- 机器学习实验所需内容.zip
- 哈工大计算机操作系统历年试题(含答案哦)
- 湖南科技大学计算机组成原理课设
- DelphiVCL4Python-main.zip
- 微信小程序设计-健康菜谱.zip
- 微信小程序设计-笑话.zip
- 微信小程序设计-V2EX社区小程序.zip
