"APOLLO自动泊车系统详解与实践"
需积分: 0 52 浏览量
更新于2023-12-31
收藏 3.58MB PDF 举报
Apollo规划模块是一个旨在实现全自动泊车的系统,通过360环视和超声波雷达等传感器,它能够搜索车辆周围的环境,并找到适合停车的位置。同时,根据驾驶员的选择,它能够自动或手动确定目标停车位,计算出自动泊车轨迹,并引导车辆停放在目标位置上。
这个系统适用于不同类型的车辆,包括轿车、SUV、MPV和卡车等。它遵循ISO 20900标准中针对部分自动停车系统(PAPS)的性能要求和试验程序。根据这个标准,全自动泊车系统可以分为两种类型。第一种类型是由位于驾驶员座椅的常规驾驶员监督的系统,而第二种类型是由远程驾驶员监控的系统,远程驾驶员可以在车内或车外进行监控。
全自动泊车系统涉及到几个关键的用例。首先是车位类型的识别,系统能够区分不同类型的停车位,例如由车道标记区分的停车位和没有车道标记的停车位。其次是环境条件的考虑,包括不同颜色的车位、不同质量的车位以及不同的光照度和气候条件的影响。
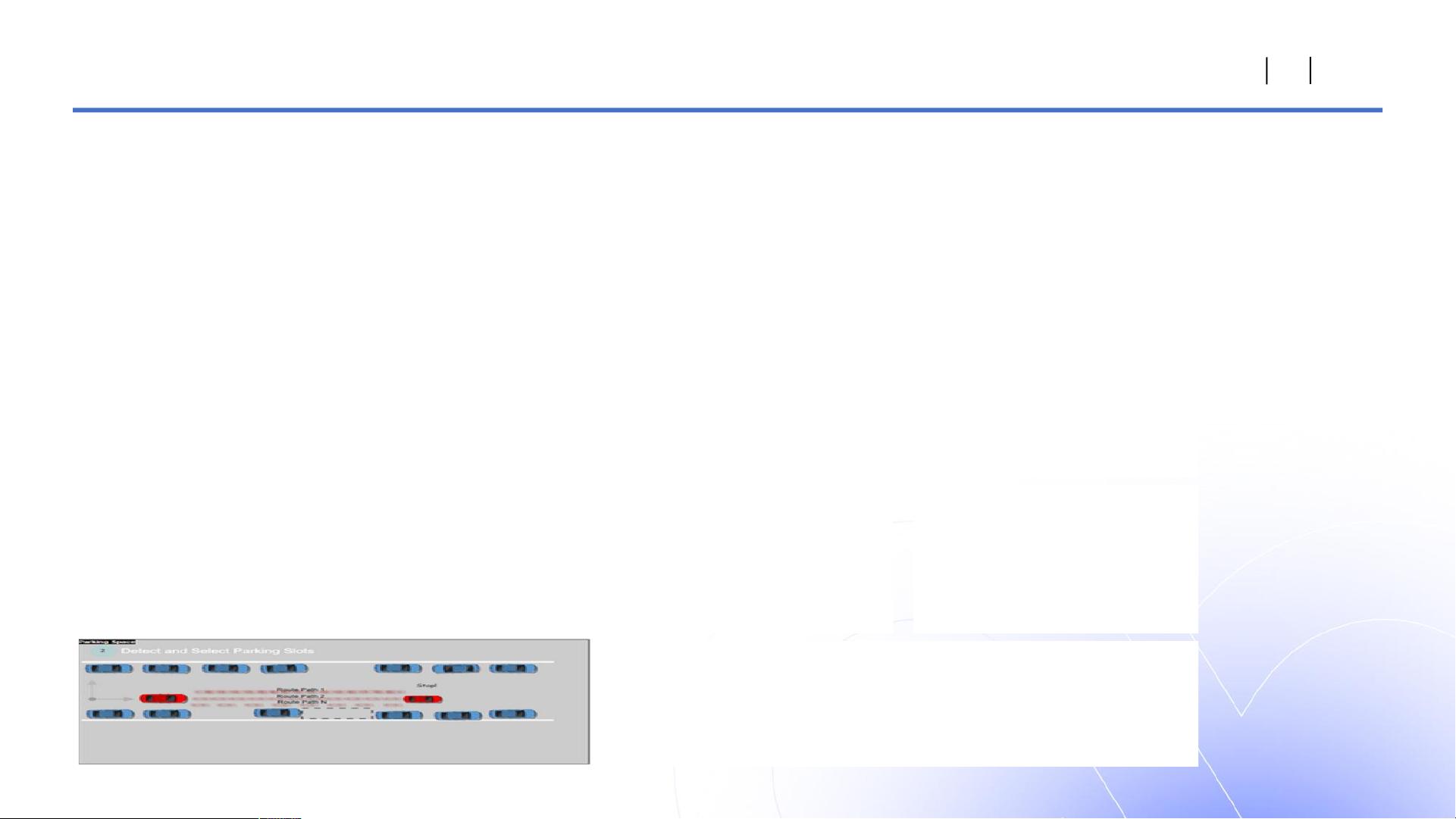
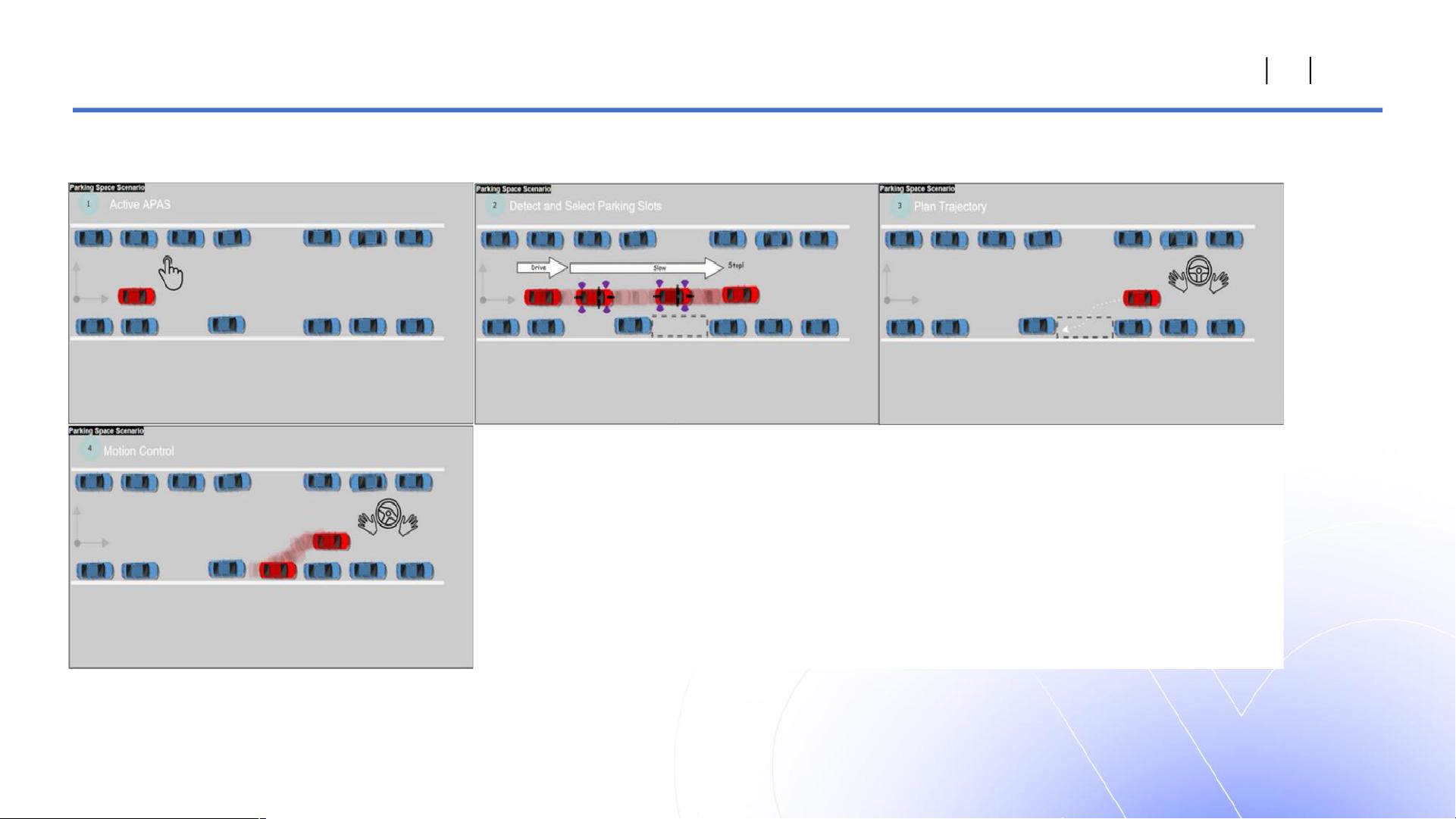
为了实现全自动泊车,Apollo规划模块采用了一系列算法和技术。首先,通过360环视和超声波雷达等传感器,系统能够感知车辆周围的环境。然后,它使用计算机视觉和图像处理算法,分析传感器数据,以确定适合停车的位置。接下来,系统计算出最佳的泊车轨迹,并发送横向和纵向控制命令,引导车辆停放在目标位置上。为了达到一定的位置精度要求,系统还需要进行精确的定位和导航。
为了使得全自动泊车系统能够在不同的环境条件下工作,Apollo规划模块还包括一些自适应的功能。例如,在不同光照度和气候条件下,系统能够调整传感器的参数和算法的参数,以适应不同的情况。此外,系统还可以学习并适应驾驶员的行为模式,以提供更加个性化的服务。
总之,Apollo规划模块是一个实现全自动泊车的系统,通过感知环境、计算泊车轨迹和控制车辆移动等功能,它能够引导车辆停放在目标位置上。这个系统在实现全自动泊车的同时,还考虑到了不同的车辆类型和不同的环境条件。它采用了先进的算法和技术,包括计算机视觉、图像处理和自适应控制等,以提供安全、高效和便捷的泊车体验。
泊车系统介绍
Ø 关键 Use Case—环境条件
T type entrance Closed type entrance
Line type entrance
Entrance with marker(arrow)
Yellow lane markerDouble line
White lane marker Different quality of lane marker
Different weather Perpendicular slot
Parallel parking space
White lane marker
Different route and speed
Different stop point
剩余30页未读,继续阅读
2022-12-09 上传
2022-12-08 上传
2022-04-17 上传
点击了解资源详情
2021-05-25 上传
2018-03-19 上传

Ponnyao
- 粉丝: 8349
- 资源: 33
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
