CAN与Arinc825:汽车与航空领域的串行通信技术详解
需积分: 0 184 浏览量
更新于2024-06-27
5
收藏 10.24MB PPTX 举报
CAN (Controller Area Network) 是一种专为汽车行业设计的串行通信总线技术,由德国博世公司于20世纪80年代开发。它以其高性能、高可靠性和分布式控制的优势,在汽车、航空、工业控制及安全防护等多个领域得到了广泛应用。CAN最初在1986年的汽车工程协会大会上提出,随后Intel推出了首款CAN控制器芯片82526,标志着CAN技术的标准化进程。
CAN有两个主要标准:ISO11898(高速CAN)和ISO11519(低速单线CAN)。ISO11898定义了125kbps到1Mbps的通信速率,适用于闭环总线,最大传输距离可达40米,适用于需要高速数据交换的场合。而ISO11519则定义了10kbps到125kbps的通信速率,作为开环总线,最大传输距离可达到1000米,适用于更广泛的低速控制需求。
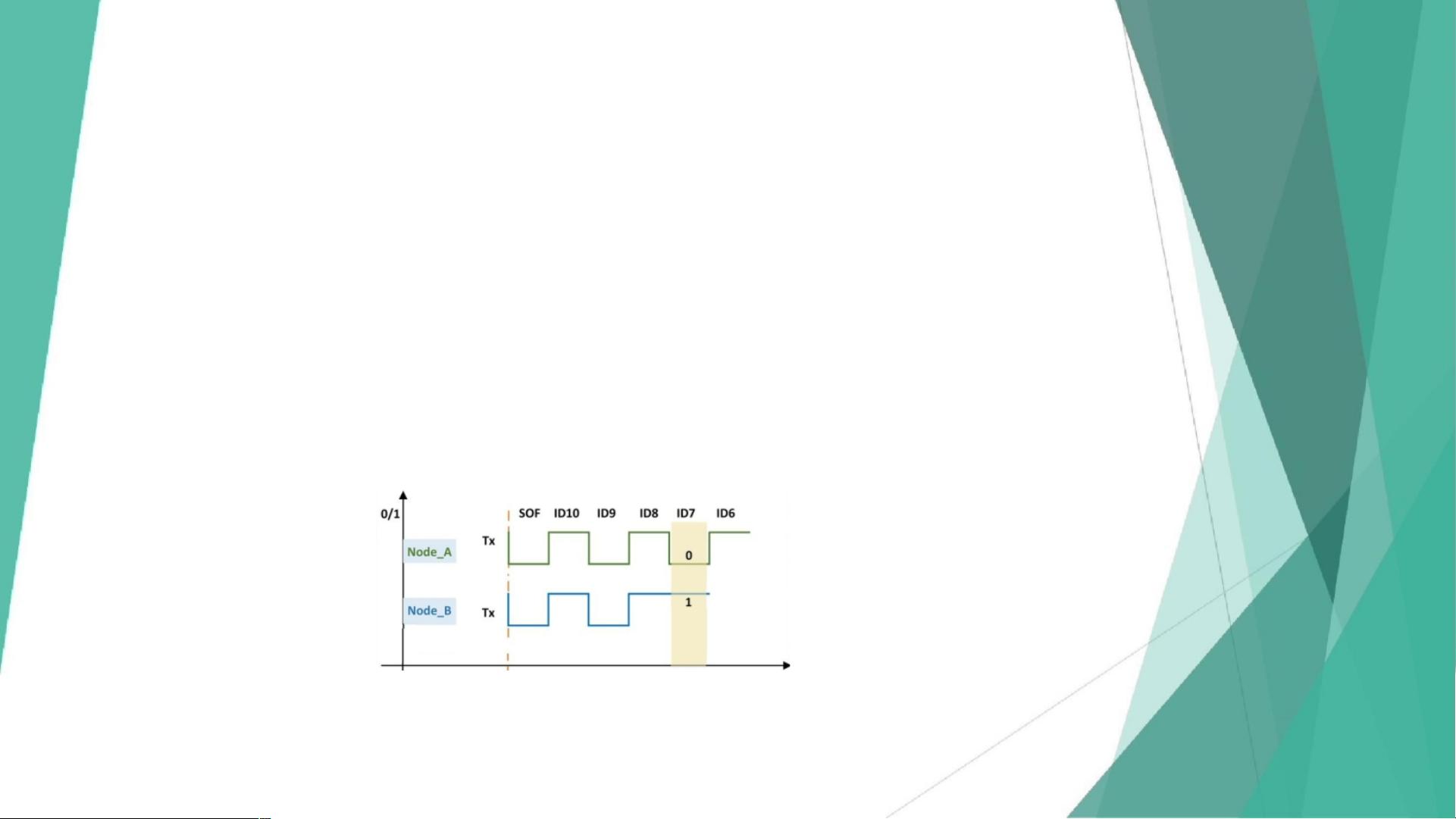
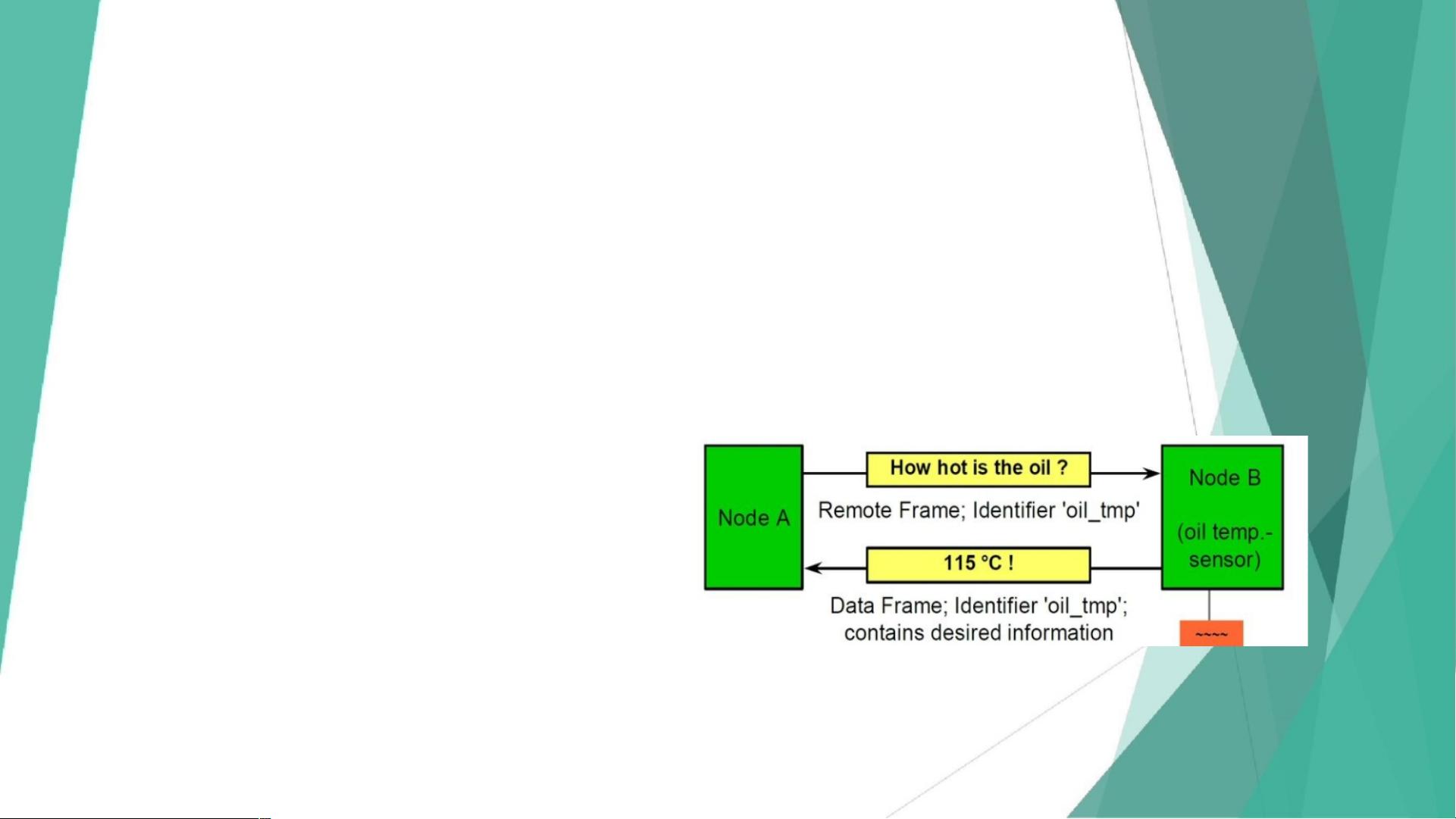
CAN通信的特点包括具有错误检测和自我恢复能力的循环冗余校验(CRC)、仲裁机制确保多节点共享总线时数据的正确发送,以及高效的位定时和同步机制,这些使得CAN在网络中能够实现可靠的数据传输。CAN通信帧包含了标识符、数据段和远程帧请求等部分,通过这些结构实现了准确的信息传递。
KVASER是一家专注于CAN解决方案的供应商,他们提供一系列CAN相关产品和服务,满足不同用户的需求。另一方面,Arinc825是另一种通信协议,虽然没有直接提及其与CAN的关系,但从上下文推测可能是某个特定行业或应用领域中与CAN类似的技术,如航空电子领域。
CANAviationAlliance可能是指一个关注航空领域CAN应用的专业联盟或者组织,他们可能也提供针对航空电子系统集成的CAN通信解决方案,强调了CAN技术在航空领域的应用,比如发动机控制、电子动力转向、环境监控等。
本文主要介绍了CAN协议的发展历程、标准特性、通信方式以及相关产品的介绍,特别是在汽车和航空行业的具体应用。无论是CAN本身还是与其相关的Arinc825协议,都是为了支持高效、可靠的分布式控制系统在复杂环境中的稳定运行。

● CAN发展简介&应用
● CAN通信网络结构&CAN通信方式
● CAN通信特点
● CAN通信帧
● 位定时&CAN同步机制
● KVASER产品介绍
● Arinc825帧结构&通讯特点
● CANAviationAlliance产品介绍
12
剩余66页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2017-09-04 上传
2024-12-04 上传
2021-09-25 上传
2021-09-30 上传
2008-08-21 上传
2015-04-13 上传

weixin_58365605
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







