松下FPXH六轴PLC编程详解与功能设置
松下PLC FPXH六轴编程指南详细介绍了如何在松下PLC系统中进行六轴运动控制,包括AFPXH-C60T1台的配置与使用。该文档的重点在于操作步骤和技术细节,以确保设备的高效运行。
1. PLC硬件配置:
- 使用了松下伺服1套,配合AFPXH-C60T1台,作为六轴运动控制器的基础硬件。
- PLC软件设置中,关键步骤包括设置主单元输出,如Y0-YB脉冲输出,以及主单元输入设置,确保回原点功能正常。
2. 脉冲及相关参数设置:
- 打开PLC软件后,进入“选项—PLC系统寄存器设置”,对脉冲输出进行配置,比如选择适当的脉冲通道CH0-CH5,并进行参数设置。
- 在“位置控制数据表设定”界面,可以设置脉冲输出使用的通道数目和参数属性,如运动点的N0.0-N0.20的运动参数。
3. 指令F380-F385的使用:
- F380POSST是位置控制数据表启动指令,用于根据预设数据启动各种运动控制,如E点、P点、C点和J点控制,支持直线插补。例如,F380POSSTS1, S1, S3分别对应通道号、数据表号和输出类型。
- F381JOGST则是JOG运行启动指令,根据预先设定的轴设置参数来启动JOG模式,支持方向控制。
4. 注意事项:
- 参数设置时需注意通道编号和数据表编号的范围限制,以及输出类型的选择,如增量模式或速度表更新。
- 为了实现精确控制,必须理解并正确应用这些指令,同时实时读取和调整CH的过程值,以监控运动过程。
通过本指南,用户可以学习到如何通过松下FPXH PLC进行六轴运动控制的具体编程实践,这对于工业自动化和机器人技术的工程师来说是一项重要的技能。在实际操作中,理解并熟练运用这些指令和参数设置,能有效提升生产效率和产品质量。
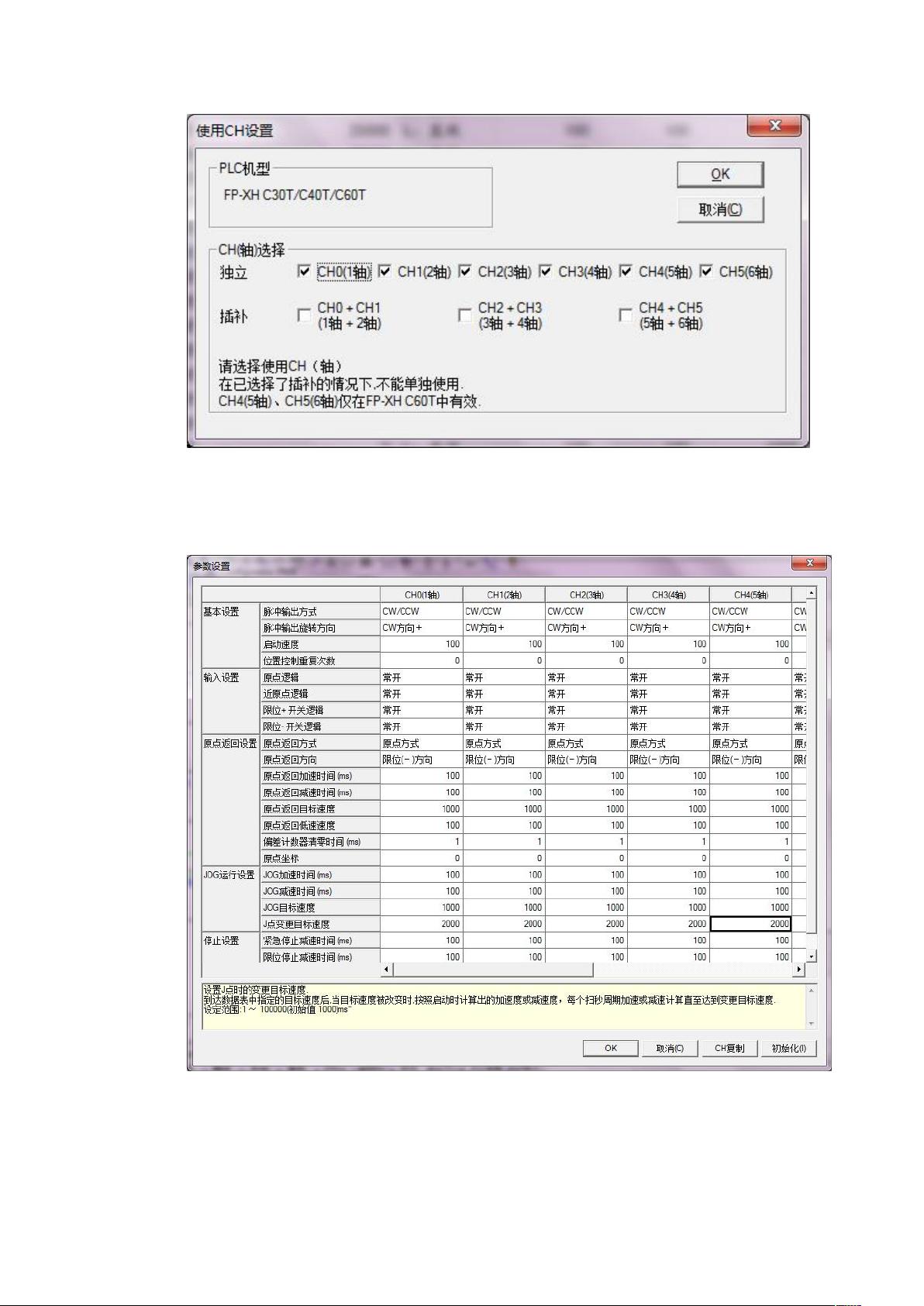
1.4 设置“脉冲参数属性设置”,点击”CH 设置—参数设置”。
图六
图六
1.5 设置运动点 N0.0---NO.20 各点运动参数。例如本例如下设
剩余16页未读,继续阅读
327 浏览量
点击了解资源详情
点击了解资源详情
497 浏览量
1400 浏览量
273 浏览量
186 浏览量
124 浏览量

tanghui0202
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易信达软件功能列表——通用系列
- portfolio2
- awesome:另一个很棒的列表,但是带有本地主机搜索引擎
- 第八代内场测 试用例_2022_1204_1.7z
- 供应链管理——采购与委外策略
- python-api-challenge
- init-script:为您的 docker 容器构建生成并安装一个 init 脚本,使它们作为基于 Debian 的服务运行
- GastoSemanalApp:一个使用React,Sass,HTML和CSS简短uuid库制作的每周支出的小应用程序
- imyangqi.github.io:这是我的博客
- Professor-Poracle:Discordpokédex机器人具有针对PokémonGo的目标CP信息
- upload
- 现代物流稿DOC
- python+pyqtgraph+pyqt5 基于python的虚拟串口示波器,使用pyqtgraph动态绘图
- 黑客排名
- ranidb:一个将JSON文件用于Node.JS的简单“数据库”
- 现代制造业与现代物流PPT
