FANUC机器人仿真软件ROBOGUIDE操作指南
需积分: 13 7 浏览量
更新于2024-07-09
收藏 8.04MB DOCX 举报
"FANUC机器人仿真软件操作手册提供了关于如何使用FANUC的ROBOGUIDE软件进行机器人系统配置、变位机创建、行走轴设定以及仿真录像制作的详细步骤。该手册适用于FANUC的R-J3iB和R-30iA控制器,特别强调了软件安装、注册、Workcell的创建以及变位机和焊枪的配置。"
FANUC机器人仿真软件,主要指ROBOGUIDE,是一款强大的工具,用于模拟和优化FANUC工业机器人的工作流程。本手册详细介绍了从软件安装到实际操作的全过程。
1. **软件安装与注册**
- 软件安装需先安装SimPRO,然后安装WeldPro,如果涉及多机器人协调,还需安装MultiRobotArcPackage。
- 安装完成后,需通过Help/RegisterWeldPRO进行注册,注册后可获得200天的使用期限。
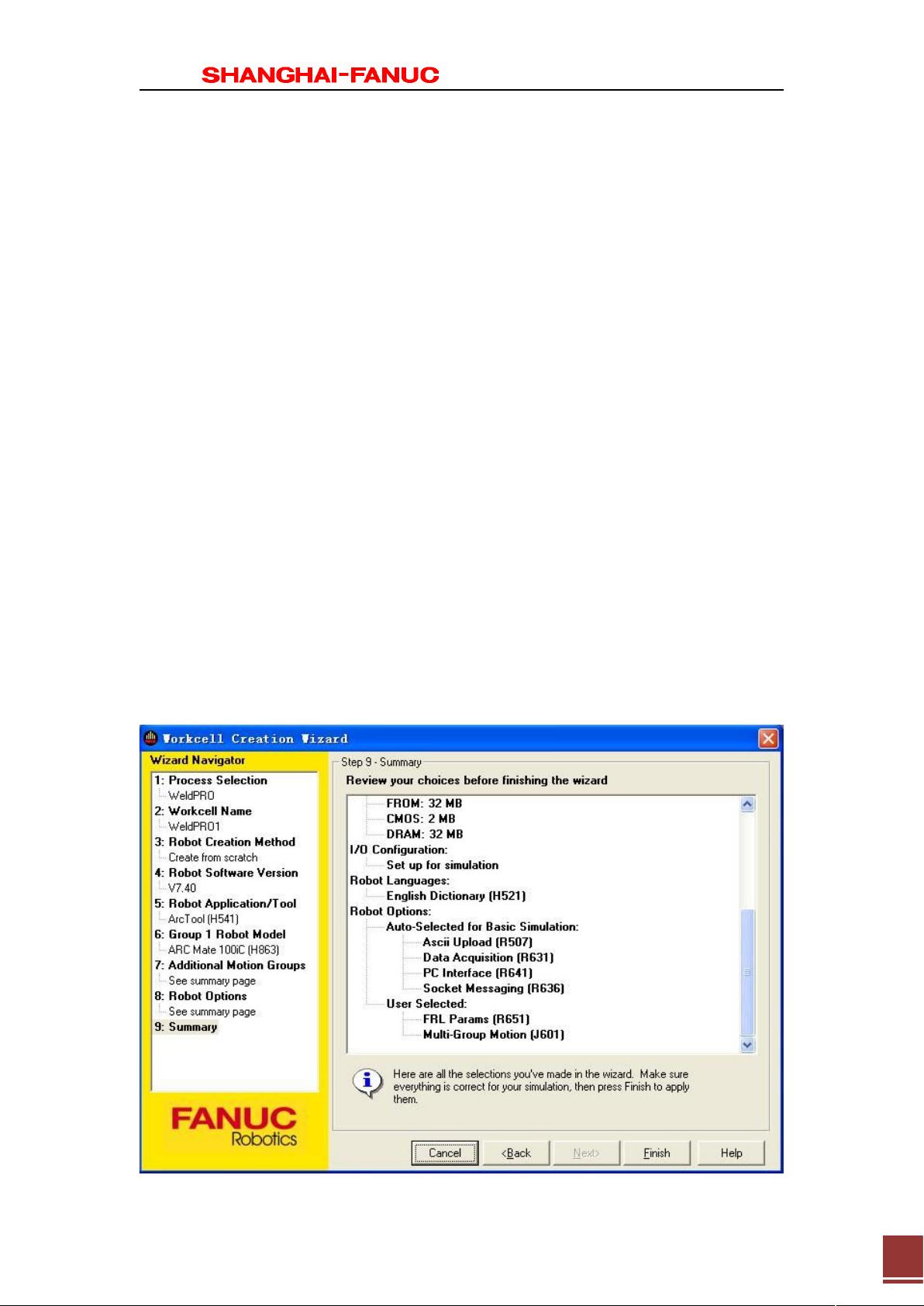
2. **新建Workcell**
- Workcell是机器人工作站的基础,新建时需在Name栏输入字母开头的文件名,并根据需求选择缺省配置、上次使用配置、机器人备份文件或已有机器人的拷贝来创建。
- 选择对应的机器人软件版本(如V6.**对应R-J3iB,V7.**对应R-30iA)和应用软件(如ArcTool)。
- 选定合适的机器人型号,之后可以更改,同时配置Group2~7的设备,例如变位机。
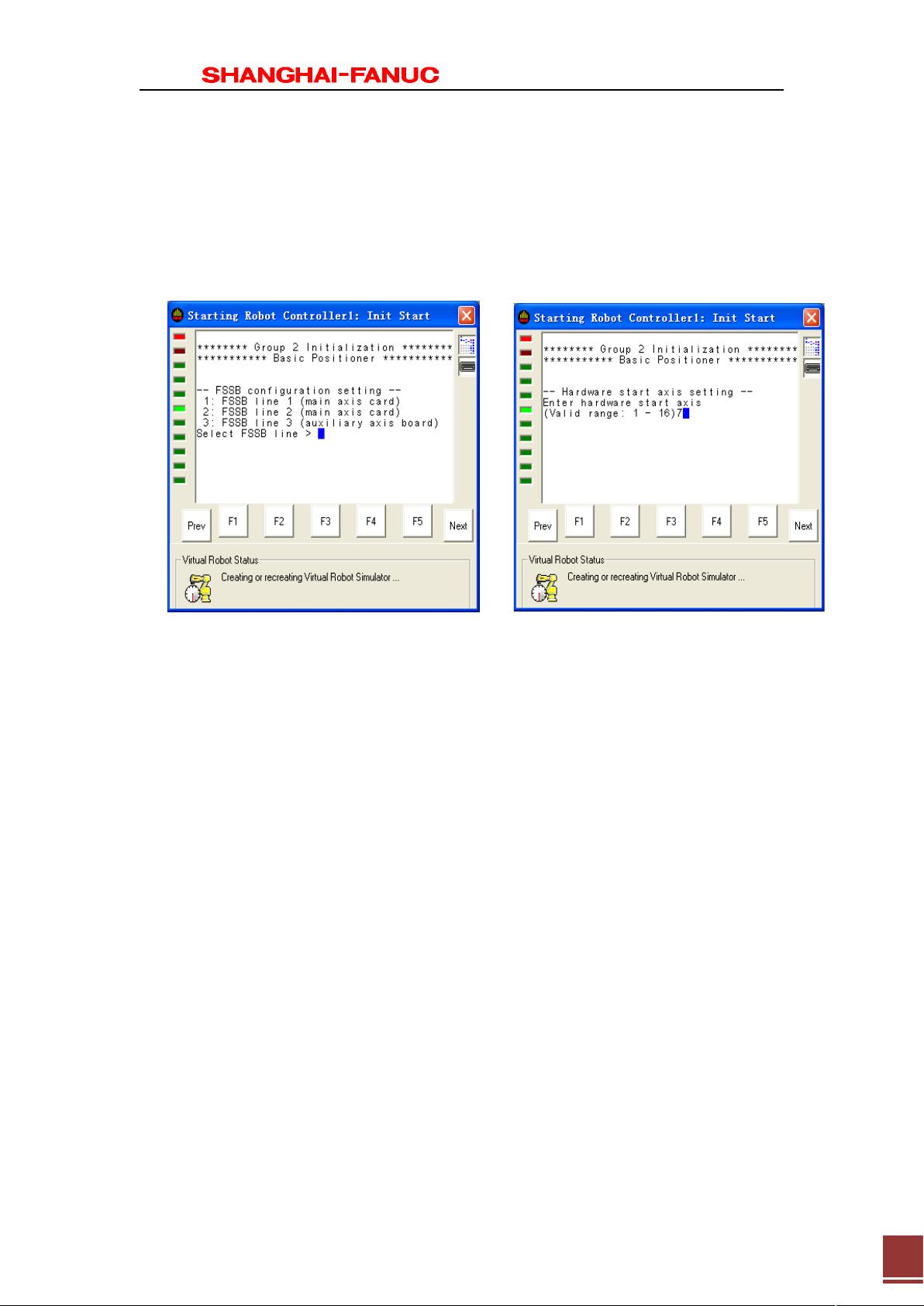
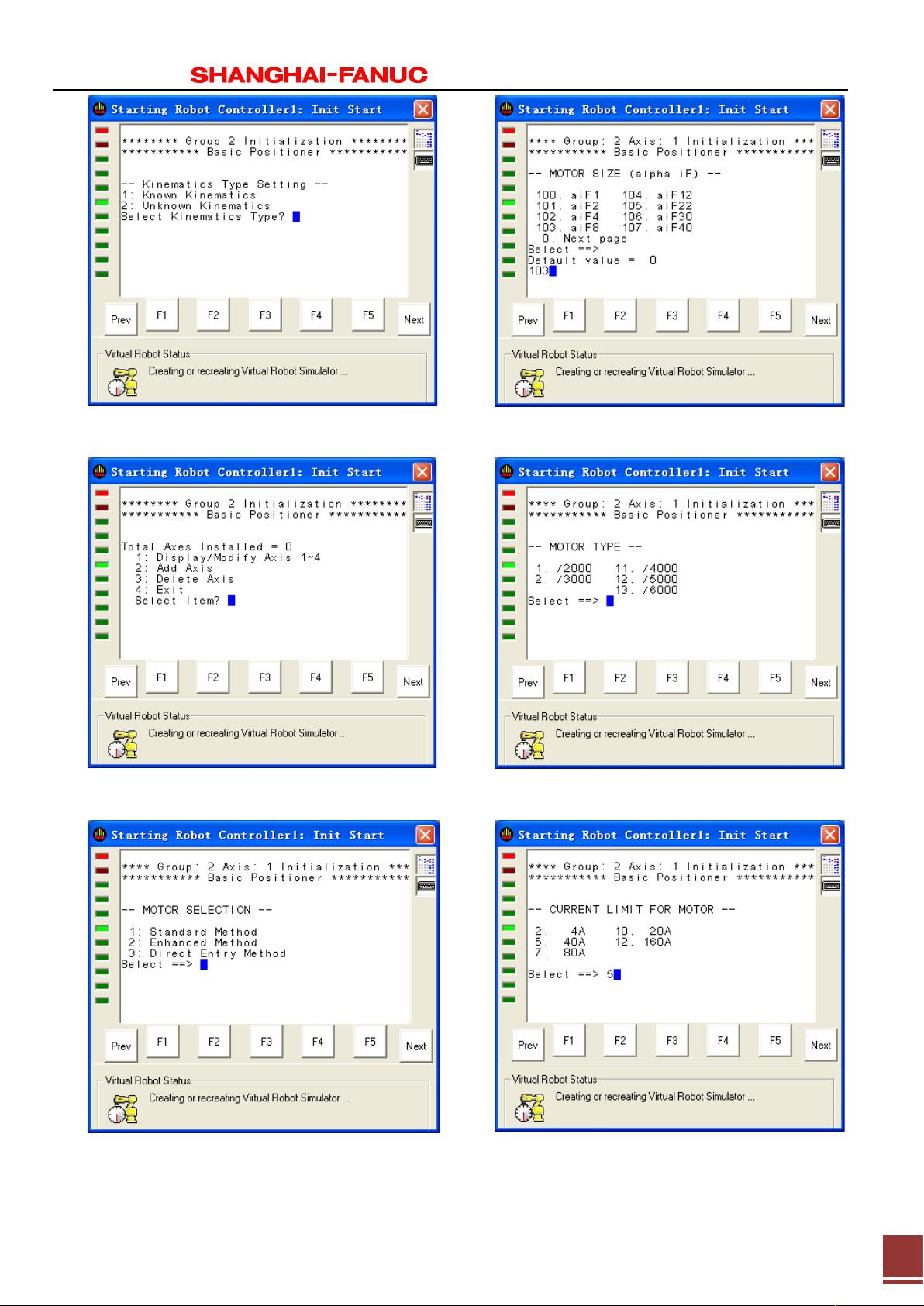
3. **创建变位机**
- 变位机的创建可以通过自建数模或利用模型库完成。
- 自建数模可以快速简易创建,也可导入外部模型。
- 模型库创建则包括导入默认配置的变位机和手动装配。
4. **创建机器人行走轴**
- 行走轴的创建可以利用模型库,也可以自建数模,以适应不同的工作环境和需求。
5. **变位机协调功能**
- 单轴变位机协调功能的设置及示例,确保机器人在变位机上的精确运动。
6. **添加其他外围设备**
- 这一步骤允许用户集成其他设备,如焊枪、传感器等,以构建完整的机器人系统。
7. **仿真录像的制作**
- 制作仿真录像可以用于演示、培训或验证工作流程,是优化和展示机器人工作过程的有效方式。
本手册不仅对新手友好,也为经验丰富的用户提供详细的操作指南,帮助用户充分利用FANUC的ROBOGUIDE软件,实现高效、准确的机器人仿真和编程。通过掌握这些知识,用户能够设计出符合特定生产需求的自动化工作流程,提高生产效率和质量。
2
上海发那科机器人有限公司
1A05B-2500-
H871 ARC Positioner
FANUC 二轴变位机
1A05B-2500-
J511 TAST Arc Sensor
1A05B-2500-
J518 Extended Axis Control
行走轴
1A05B-2500-
J526 AVC
弧压控制
1A05B-2500-
J536 Touch Sensing
接触传感
1A05B-2500-
J605 Multi Robot Control
多机器人控制,Dual Arm 中
用
1A05B-2500-
J601 Multi-Group Motion
多组控制,有变位机,必须选
1A05B-2500-
J617 Multi Equipment
多设备,Tamdem Mig 中用
1A05B-2500-
J613 Continuous Turn
连续转,
1A05B-2500-
J678 ArcTool Ramping
焊接参数谐波变化
1A05B-2500-
J686 Coord Motion Package
变位机协调功能
剩余63页未读,继续阅读
2023-07-11 上传
2023-06-10 上传
2023-02-24 上传
2023-05-30 上传
2023-10-01 上传
2023-05-31 上传
2023-10-28 上传
2023-08-02 上传

没?也一样
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
