ROS机器人操作系统完全参考指南(第三卷)
需积分: 14 174 浏览量
更新于2024-07-18
1
收藏 32.07MB PDF 举报
"Robot Operating System (ROS) - The Complete Reference (Volume 3) 是一本由Anis Koubaa编辑的专业书籍,聚焦于ROS系统,包含了实际操作示例、演示和插图,旨在全面介绍ROS技术。该书属于'Studies in Computational Intelligence'系列,由Janusz Kacprzyk担任系列编辑,旨在快速且高质量地发布计算智能领域的最新进展和应用。"
ROS(Robot Operating System)是机器人技术领域的一个开源操作系统,为机器人设备和软件提供了一个标准化的框架。它提供了一整套工具、库和协议,使开发人员能够轻松地构建复杂的机器人应用程序。ROS的主要目标是促进硬件抽象、低级别设备控制、消息传递、软件包管理、任务规划等多个组件之间的通信。
这本书的第三卷深入探讨了ROS的各种方面,可能包括以下知识点:
1. **ROS基础知识**:涵盖ROS的核心概念,如节点(Node)、消息(Message)、服务(Service)、参数(Parameter Server)以及图形化工具如rqt和rviz的使用。
2. **ROS架构**:解释ROS的层次结构和模块化设计,以及如何通过ROS Master和ROS Graph实现节点间的发现和通信。
3. **ROS包管理**:介绍如何使用catkin工作空间创建、编译和部署ROS软件包,以及如何利用rosdep来管理依赖关系。
4. **传感器和执行器接口**:详细讲解ROS如何与各种传感器(如激光雷达、摄像头)和执行器(如电机)交互,包括传感器数据的处理和解析。
5. **导航和移动机器人**:讨论ROS的移动机器人导航堆栈(包括amcl、move_base等),以及路径规划、定位和避障策略。
6. **SLAM(Simultaneous Localization and Mapping)**:介绍如何在ROS中实现同时定位与建图,如使用Gmapping或 Hector SLAM。
7. **ROS编程**:讲解使用C++和Python进行ROS编程的基本方法,包括编写节点、订阅和发布消息、实现服务等。
8. **ROS实战示例**:书中可能包含实际机器人项目案例,展示如何将ROS应用于机器人控制系统的设计和实现。
9. **高级主题**:可能涉及ROS的并发模型、多机器人协作、ROS2新特性,以及如何将ROS系统与其他系统(如ROS-I for industrial robots或ROS-Industrial for manufacturing environments)集成。
10. **调试与测试**:介绍ROS中的调试工具,如rosbag用于记录和回放数据,以及如何编写单元测试和功能测试确保代码质量。
通过阅读《ROS - The Complete Reference (Volume 3)》,读者将能深入理解ROS的各个方面,不仅学习到理论知识,还能通过实例获得实践经验,为机器人系统开发打下坚实基础。
A ROS-Based Framework for Simulation and Benchmarking… 7
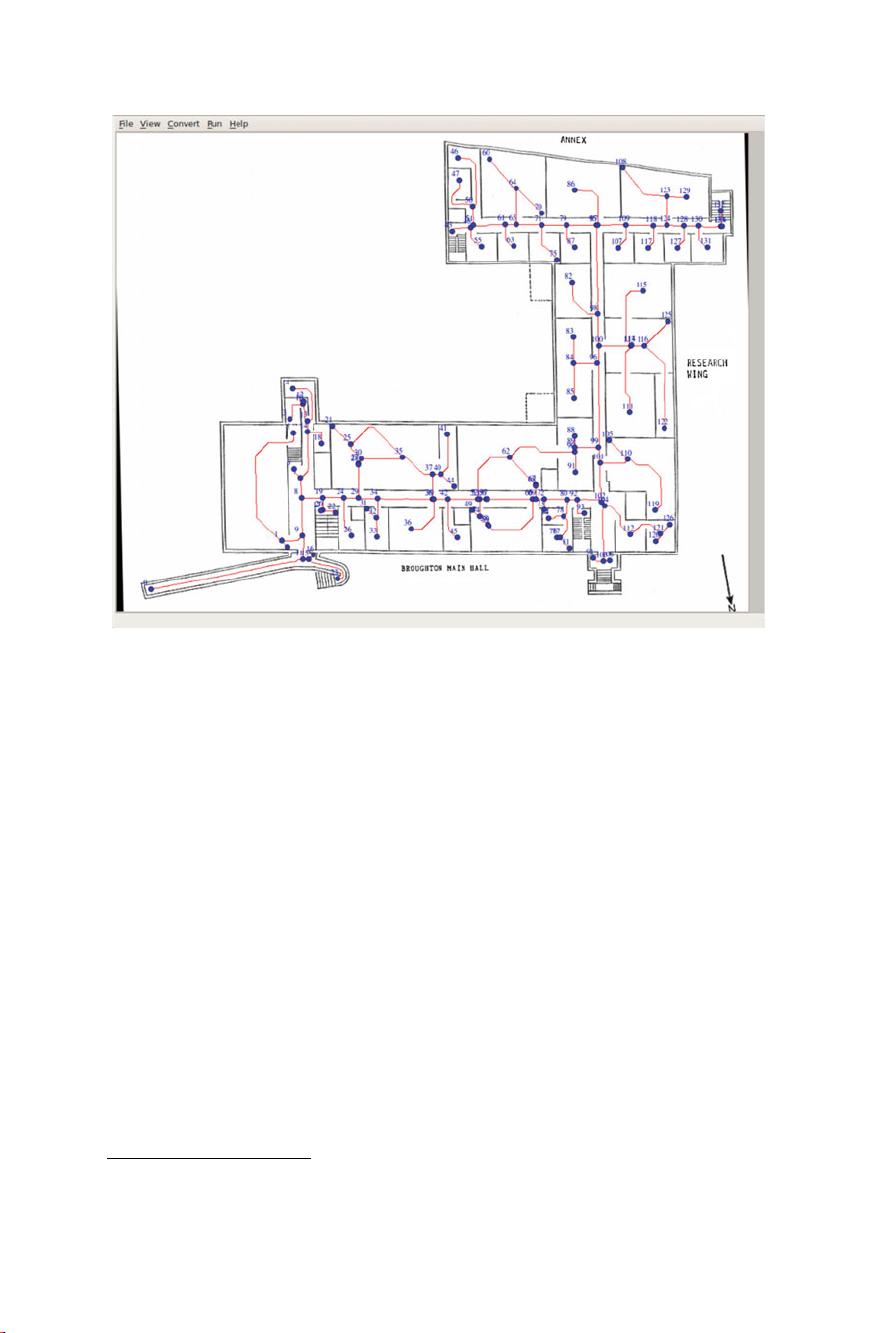
Fig. 1 A patrol graph displayed on top of a metric map to be used in multi-robot patrolling tasks.
The blue dots represent the vertices of the graph that must be visited, while the red arcs represent
the edges that connect pairs of vertices
environments), and simulation testbeds for MRS are nowadays crucial to rapidly
reproduce experiments [ 84]. While ROS and Stage provide the key building blocks
to develop realistic simulations of robotics systems, there is no ready-to-use frame-
work that allows researchers to run experiments testing and validating multi-robot
coordination strategies.
Against this background we present patrolling_sim,
1
a ROS-based framework for
simulation and benchmarking of multi-robot patrolling algorithms, which has been
developed and used by the authors in previous works [33, 85]. The patrolling_sim
framework allows to run exhaustive tests in different scenarios and with different team
sizes in fairly realistic environments, and ultimately to execute quicker experiments
in the real world by mimicking the setting up of simulated experiments. In the next
section, we describe such a framework in more details.
1
http://wiki.ros.org/patrolling_sim.



剩余603页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-11-05 上传
2018-12-17 上传
2018-12-17 上传
2018-12-04 上传
110 浏览量
2021-10-06 上传









