20世纪80年代并联机器人机构发展综述与挑战
需积分: 10 118 浏览量
更新于2024-11-12
1
收藏 702KB PDF 举报
并联机器人机构研究现状分析
并联机器人作为20世纪80年代兴起的前沿技术,它结合了机电系统与计算机控制,展现出了串联机器人机构难以企及的优势。这类机器人机构的独特之处在于由至少两个独立运动链构成,动平台与静平台之间形成至少两个以上的自由度,形成了一个闭环结构。这种设计使得并联机器人具有极高的刚度、承载能力和精度,使得其在运动模拟器、数控机床、微动机器人、空间对接等高科技领域有着广泛的应用潜力,与串联机器人形成了互补,拓宽了机器人的应用范围。
早期的并联机器人雏形可以追溯到20世纪初,如1934年Pollard的汽车喷漆机器人和1947年Gough的轮胎检测装置,这些发明标志着并联机器人技术的萌芽。Gough—Stewart机构,由Stewart在1965年的研究中进一步发展,它因其能够在飞行模拟器中实现复杂的运动控制而知名,成为了并联机器人机构中最常见的一种。
并联机器人机构的特点主要体现在其多分支的结构,每个分支独立运动,通过球铰连接,这种设计提供了高度的灵活性和定位精度。然而,尽管并联机器人显示出巨大的优势,其研究仍面临一些挑战,包括动态性能分析、控制策略优化、精度保持和稳定性提升等问题。深入解决这些问题对于推动并联机器人技术的进一步发展至关重要。
当前,随着科技的进步,基于并联机器人机构的产品不断涌现,但理论研究和实际应用之间的差距仍有待填补。未来的研究可能集中在提高并联机器人机构的动态响应、降低复杂性、集成智能控制算法以及开发适用于特定工业环境的定制化解决方案上。尽管并联机器人机构取得了显著成就,但其潜力尚未完全挖掘,期待更多的创新和突破。
第21卷第3期
2009年9月
北方工业大学学报
J.NORTH
CHINA
UNIV.OF
TECH.
V01.21
No.3
Sept.2009
并联机器人机构研究现状分析*
黄昔光
何广平 谭晓兰 袁俊杰
崔桂芝
(北方工业大学机电工程学院,100144,北京)
摘 要
并联机器人是20世纪80年代新兴起的机电及计算机控制相结合的先进技术,具
有串联机器人机构无法比拟的优点.文中对并联机器人机构的起源、主要特点、应用领域,以及
理论研究内容等方面进行了概述,同时指出了一些有待深入解决的主要问题.
关键词并联机构;并联机器人;运动学
分类号THll2
并联机器人机构是由至少两个独立的运动
链将动平台和静平台连接而成,并具有两个或
两个以上自由度的一种闭环机构,它是20世纪
80年代新兴起的机电及计算机控制相结合的
先进技术.与传统的串联机器人机构相比,并联
机器人机构具有刚度大、承载能力强、误差小以
及精度高等优点[1],在应用上与广泛应用的串
联机器人机构构成互补关系,从而扩大了机器
人的应用领域,众多研究机构和企业一致看好
其应用前景.目前许多基于并联机器人机构的
产品已经被设计和开发出来,其应用涉及到运
动模拟器、数控机床、微动机器人、空间对接机
构等诸多现代高、精、尖技术领域.
本文对并联机器人机构的起源、主要特点、
应用领域,以及其理论研究内容进行了概述,并
由此来确定并联机器人机构这一领域有待深入
解决的关键问题.
1
并联机器人机构的起源与特点
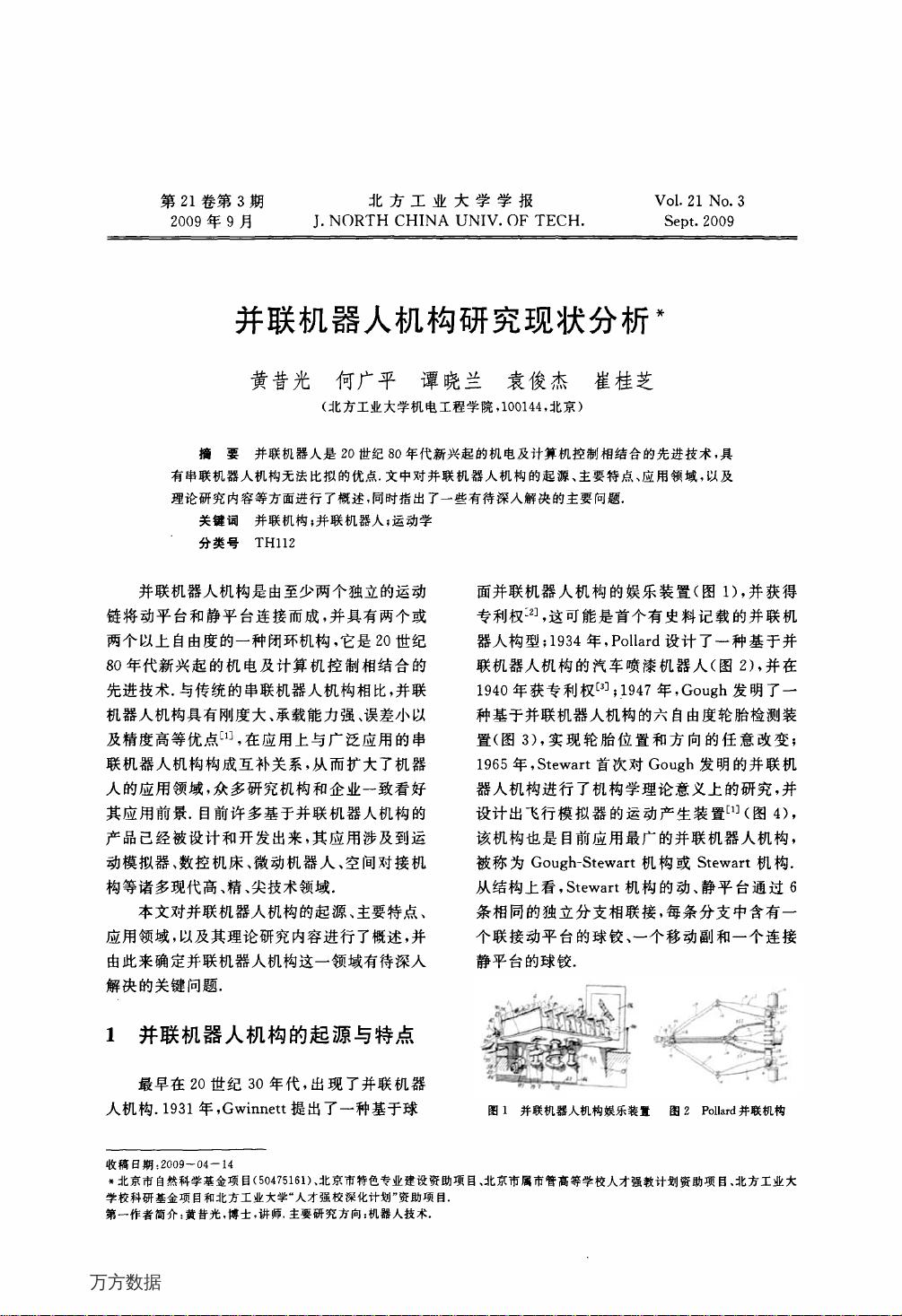
面并联机器人机构的娱乐装置(图1),并获得
专利权卫],这可能是首个有史料记载的并联机
器人构型;1934年,Pollard设计了一种基于并
联机器人机构的汽车喷漆机器人(图2),并在
1940年获专利权[33;1947年,Gough发明了一
种基于并联机器人机构的六自由度轮胎检测装
置(图3),实现轮胎位置和方向的任意改变;
1965年,Stewart首次对Gough发明的并联机
器人机构进行了机构学理论意义上的研究,并
设计出飞行模拟器的运动产生装置[1](图4),
该机构也是目前应用最广的并联机器人机构,
被称为Gough—Stewart机构或Stewart机构.
从结构上看,Stewart机构的动、静平台通过6
条相同的独立分支相联接,每条分支中含有一
个联接动平台的球铰、一个移动副和一个连接
静平台的球铰.
最早在20世纪30年代,出现了并联机器
人机构.1931年,Gwinnett提出了一种基于球
图1并联机器人机构娱乐装置
图2
Poll。rd并联机构
收稿日期:2009—04—14
*北京市自然科学基金项目(50475161)、北京市特色专业建设资助项目、北京市属市管高等学校人才强教计划资助项目、北方工业大
学校科研基金项目和北方工业大学“人才强校深化计划”资助项目.
第一作者简介:黄昔光,博士,讲师.主要研究方向:机器人技术.
万方数据
下载后可阅读完整内容,剩余9页未读,立即下载
2021-09-29 上传
2019-09-15 上传
2021-04-21 上传
点击了解资源详情
点击了解资源详情
2021-08-14 上传
2023-07-12 上传
2021-08-14 上传
点击了解资源详情

polo0801
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
