巴鲁夫BLT7微脉冲位移传感器技术详解
67 浏览量
更新于2024-08-26
收藏 343KB PDF 举报
"本文详细介绍了巴鲁夫微脉冲位移传感器BLT7,特别是型号BTL7-E100-M0175-B-KA05,它在新疆信发1000WM机组电动给水泵液偶勺管的位置反馈中的应用。传感器采用24VDC电源,具有4~20mA模拟量输出,输出梯度单向上升,有效测量范围为175毫米,并配有M18x1.5公制安装螺纹和5米预制电缆。"
巴鲁夫微脉冲位移传感器BLT7是一款高精度的工业级位移检测设备,常用于各种机械系统的位置反馈。这款传感器的核心技术在于其波导管中的磁感应元件,能够将磁环或磁铁的相对位置转换为电信号。传感器的电源为24VDC,输出信号为4~20mA的模拟量,输出梯度单向上升,意味着随着磁环位置的变化,输出电流会按照预设的单向规则增加。其额定长度为175毫米,这是传感器可以有效测量的最大范围。传感器的安装螺纹是M18x1.5公制规格,配备O形密封圈以确保良好的密封性能,防止环境因素对测量造成影响。
传感器的预制电缆长度为5米,线芯颜色区分明确,其中棕色和蓝色为工作电源,黄色和灰色分别代表4~20mA的输出正负极。其余线芯在这款传感器中未被使用,用户应根据实际需求进行连接。
在传感器的结构中,波导管内含磁感应元件,外部由不锈钢管保护。磁环或磁铁作为位置指示器,其移动会改变波导管内的磁场强度,从而生成对应的电信号。额定长度之外有一个60mm长的缓冲区域,不应用于测量,标定时需避免将终点设置在该区域内。
标定过程是传感器正确应用的关键步骤,包括四种模式:示教模式、调整模式、在线调整模式和复位模式。示教模式用于设定新的零点和终点;调整模式允许在无法达到标准位置时调整零点和终点值;在线调整模式则在系统运行中设置起点和终点;复位模式则将所有参数恢复至出厂设置。
标定过程中,起点和终点的位置与输出信号的梯度关系密切。标定起点时,需要将磁铁移动到相应位置并设定或调整起点值,而梯度保持不变。类似地,标定终点时也需要考虑到梯度的设定,确保传感器能够准确反映位置变化。通过这些精细的标定步骤,巴鲁夫微脉冲位移传感器BLT7能为各种工业应用提供精确的位置信息。
1. 巴鲁夫微脉冲位移传感器简介
新疆信发1000WM 机 组电 动给 水 泵液 偶 勺管 的位 置 反馈 使用 的 是巴 鲁夫 微 脉冲 位移 传 感器 ,
具体型号是:
BTL7-E100-M0175-B-KA05
该 传 感器 使 用 24VDC 电 源, 模 拟量 4~20mA 输出 ,输 出 梯度 为单 向 上升 ,额 定 长度 (有 效
测 量 范围 )为 175 毫米 ,公制 安 装螺 纹 M18x1.5,有 O 形 密封 圈 ,波 导 管直 径 10.2 毫米 ,有 5
米 长 的 预 制电 缆 。预 制 电 缆线 芯 有 8 种 颜色 , 其 中: 棕 色和 蓝 色 为工 作 电源 , 黄 色和 灰 色为
4~20mA 输 出 , 其 余 线芯 在 这个 版本 传 感器 中没 有 使用 。
BN 棕色
BU 蓝色
YE 黄色
GY 灰色
透明
24VDC+(电压范围 20~28)
0V(GND)
模拟量输出+
模拟量输出—
屏蔽线
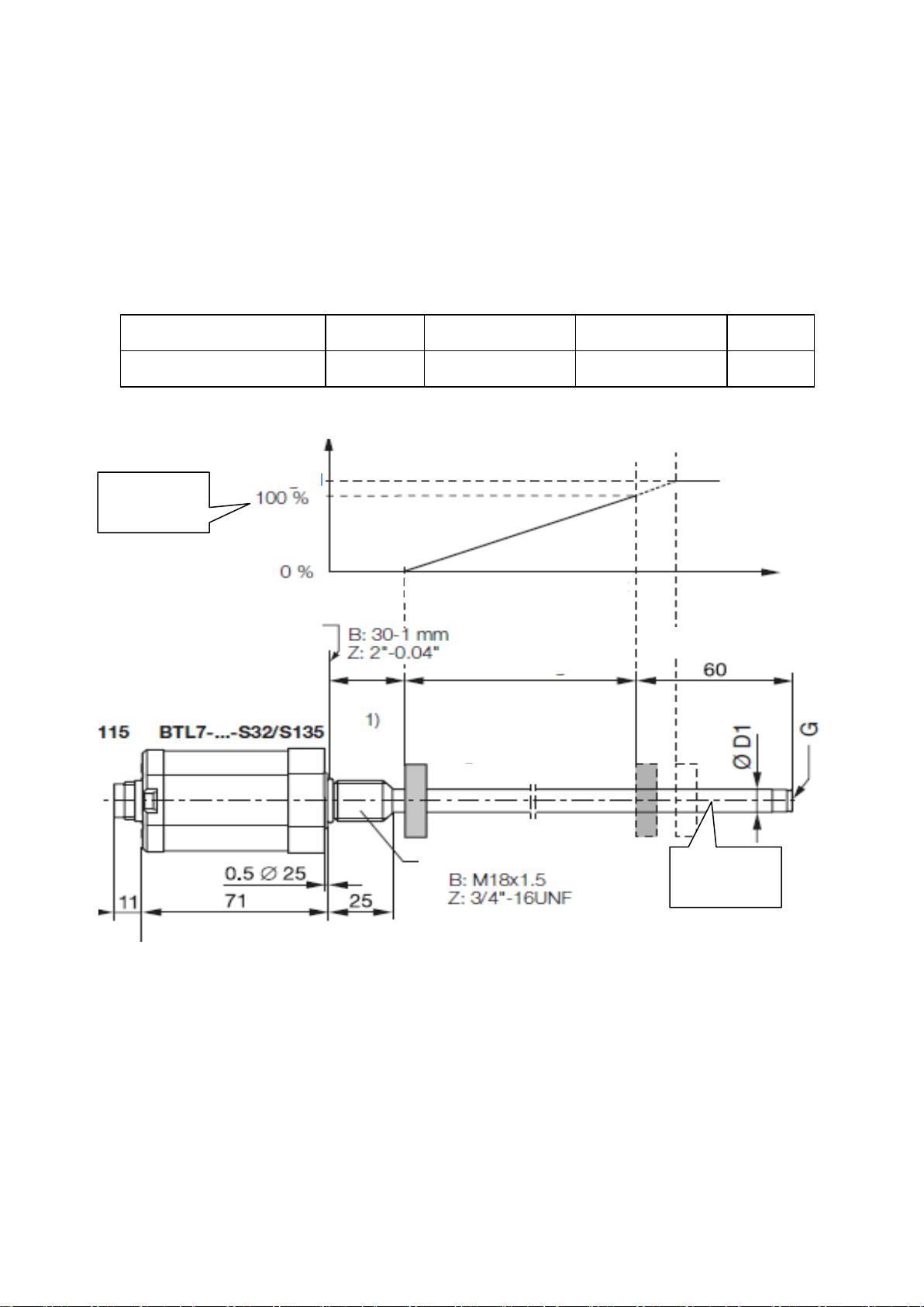
2. 输出信号与上升曲线和外形示意图
2.1. 波 导 管 : 位 于位 移 传 感器 中 , 外面 套 有 不锈 钢 管 。内 部 有 磁感 应 元 件, 可 以 将感 应 到的
外 部 磁环 或 其他 磁铁 的 位置 转 换为 电信 号,根据 设 定的 零位 和 终点 位置 计 算的 一次 函 数,
计算并输出电流信号。(其他版本的产品也有输出电压信号的)
2.2. 额定长度: 定 义 了 可用 的 测量 范 围, 磁环 在 此范 围内 移 动才 有效 。
2.3. 缓冲区域:该区域在不 锈 钢套 管 的末尾,不 能 用于 测量 。有 60mm 长 ,标 定时 不 能将 终点
位置设在此区域内。
2.4. 磁铁/磁环 :位置 指 示器 ,用 于在 波导 管 上指 示测 量 位置 ,不属 于 标配 件 ,应 该 是系 统的
一部分(如 勺 管) 。
3. 标定过程总览
本 传 感器 的 标定 操作 有 4 种 操 作模 式: 示 教模 式、 调 整模 式、 在 线调 整模 式 、复 位模 式 。
错误信号
零点
终点位置
设备平面
额定长度
(测量范围)
缓冲区(量程外)
定位磁铁/磁环
螺纹尺寸
输出信号与上
升特性曲线
波导管,外部
为不锈钢
下载后可阅读完整内容,剩余6页未读,立即下载
2019-09-20 上传
2019-09-15 上传
2019-10-14 上传
2019-09-21 上传
2019-09-15 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38745434
- 粉丝: 14
- 资源: 922
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
