MATLAB Simulink下的机器人控制系统设计与实物实验
需积分: 18 9 浏览量
更新于2024-07-16
收藏 50.72MB PPTX 举报
"该资源是关于基于模型的工业机器人设计与控制方案的PPTX文件,主要内容涵盖了从机器人系统的绪论、选型设计、运动学求解到运动控制仿真实验,最后是实物控制实验的详细步骤。"
在这个设计方案中,首先介绍了机器人控制的基础,即【一.绪论】,这部分可能涉及到机器人技术的发展、工业机器人的重要性以及基于模型设计(Model-Based Design, MDB)的基本概念和优势。MDB方法允许设计者在虚拟环境中对系统进行建模、仿真和优化,以提高设计效率和准确性。
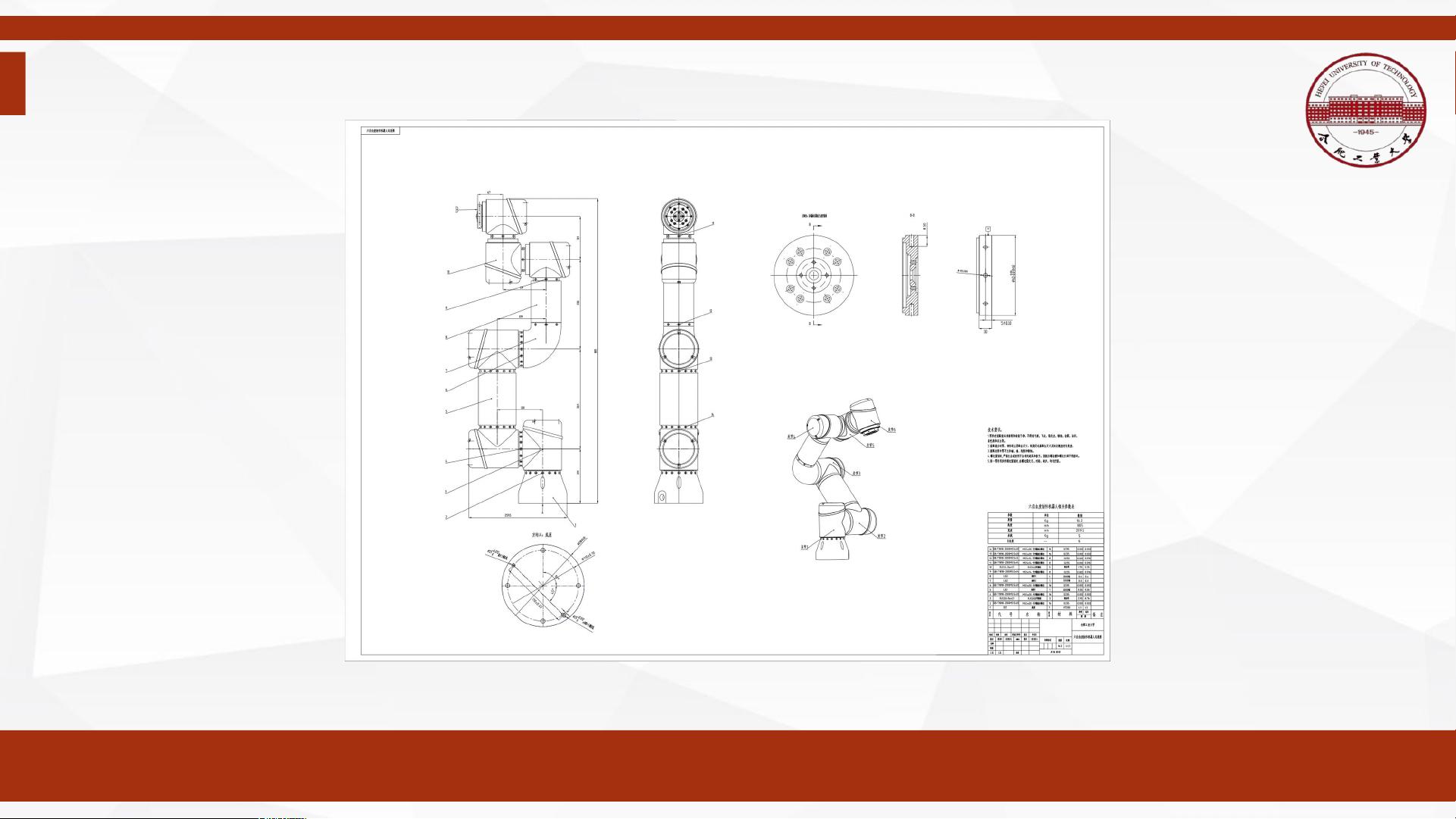
接下来是【二.选型与设计】环节,包括了关节模组、驱动器的选取以及三维建模。【1.关节模组选型】涉及到不同型号的RJS14和RJS20关节模组,这些是构成机器人臂的重要组成部分,它们的选择直接影响机器人的运动性能和负载能力。【2.驱动器选型】提到了ADM-15D80-EALT驱动器,它是驱动关节模组的关键设备,负责提供必要的动力和控制精度。此外,【3.三维建模并出详图】是为后续的分析和控制策略制定提供可视化参考。
进入【三.运动学求解】部分,这是机器人控制的核心。【DH建模】利用Denavit-Hartenberg(DH)参数对机器人结构进行数学描述,方便进行正向和反向运动学计算。【1.反向运动学】和【2.正向运动学】的数学建模及程序编写,是解决机器人从关节角度到末端执行器位置或反之问题的关键。【4.工作空间求解】则关注机器人可达到的所有空间位置,对于任务规划和避障至关重要。
【四.运动控制仿真】中,【1234安装插件】是准备MATLAB Simscape环境的步骤,接着通过【搭建Simscape物理模型】和【步进电机模型】来模拟机器人的动态行为。【MATLABFunction】用于实现运动控制算法,通过仿真验证控制策略的有效性。
在【五.实物控制实验】阶段,【1.生成C代码】是将MATLAB模型转化为实际硬件可以执行的代码,这一步是理论到实践的关键转换。【2.搭建逆解S-Function】涉及配置输入输出,确保控制器能正确接收和发送指令。【3.搭建轨迹规划S-Function】是为机器人规划平滑路径,而【4.搭建完整的控制器】则包括了输入输出元件、延时检测模块和数据转换输送模块,确保整个控制系统能够协调运行。
这份资源详细阐述了从理论设计到实物实验的全过程,对理解工业机器人控制技术具有很高的学习价值。它涵盖了机械设计、运动学分析、控制策略制定和实物系统验证等多个关键环节,是研究和实践机器人控制系统的宝贵参考资料。
二 . 选型与设计
剩余39页未读,继续阅读
2021-09-25 上传
2021-10-13 上传
2021-09-30 上传
2023-02-26 上传
2023-05-26 上传
2023-05-26 上传
2023-03-21 上传
2023-05-26 上传
2023-05-29 上传

qq_16257111
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
