基于mc9s12dg128单片机的智能车:光电传感器与循线控制算法
10 浏览量
更新于2024-09-02
收藏 223KB PDF 举报
本文主要探讨的是基于光电传感器的智能车设计,该智能车能够自主识别道路并在封闭跑道上循线运行。系统的核心是16位单片机mc9s12dg128,它作为自动控制系统的中心,负责路径识别、转向伺服电机和直流驱动电机的精确控制。设计目标在于保证模型车的可靠性和电路简洁性,同时提升车体的灵活性。
在硬件设计中,光电传感器起着至关重要的作用,作为智能车的"眼睛",它通过反射式红外传感器TCRT5000来感知赛道上的黑白线条。选择TCRT5000的原因在于其性价比高,且采用脉冲调制式发光,有助于滤除外部干扰,确保传感器数据的准确性。文章详细介绍了光电传感器的电路设计,包括数字量输出电路的选择,以及如何通过比较不同电压值来判断路径。
布局方面,文章着重讨论了光电管阵列的两种常见布局方式:一字形和W形。一字形布局简单直观,易于理论实现,但缺乏对赛道曲率的适应能力,不适合复杂的赛道环境。相比之下,W形布局能提供更好的曲率预测功能,尽管电路可能会稍显复杂,但在实际应用中更为稳健。
循线控制算法是智能车的"头脑",是整个控制系统的核心。设计者需精心构建算法,使得智能车能够根据传感器采集到的数据,实时调整方向,沿着预设线路行驶。这部分内容详述了如何将路径判断和伺服电机控制结合起来,以实现智能车的自主导航。
最后,文章概述了智能车的硬件和软件设计,包括控制器、传感器、执行机构及其驱动电路,以及信息处理和控制算法的实现。同时,也提到了实验部分,展示了设计的实际效果和性能测试的结果。本文深入探讨了光电传感器在智能车中的应用,以及如何通过精确的电路设计和算法优化,让车辆能够在复杂环境中实现自主行驶。
基于光电传感器的能自主识别道路的智能车基于光电传感器的能自主识别道路的智能车
本文主要设计的是一辆自主识别道路的智能车。整个系统采用了16位单片机mc9s12dg128,模型车本身带有差
速器和后轮驱动,需要设计完成基于单片机的自动控制系统使得模型车在封闭的跑道上自主循线运行。
引言引言
本文主要设计的是一辆自主识别道路的智能车。整个系统采用了16位单片机mc9s12dg128,模型车本身带有差速器和后轮驱
动,需要设计完成基于单片机的自动控制系统使得模型车在封闭的跑道上自主循线运行。
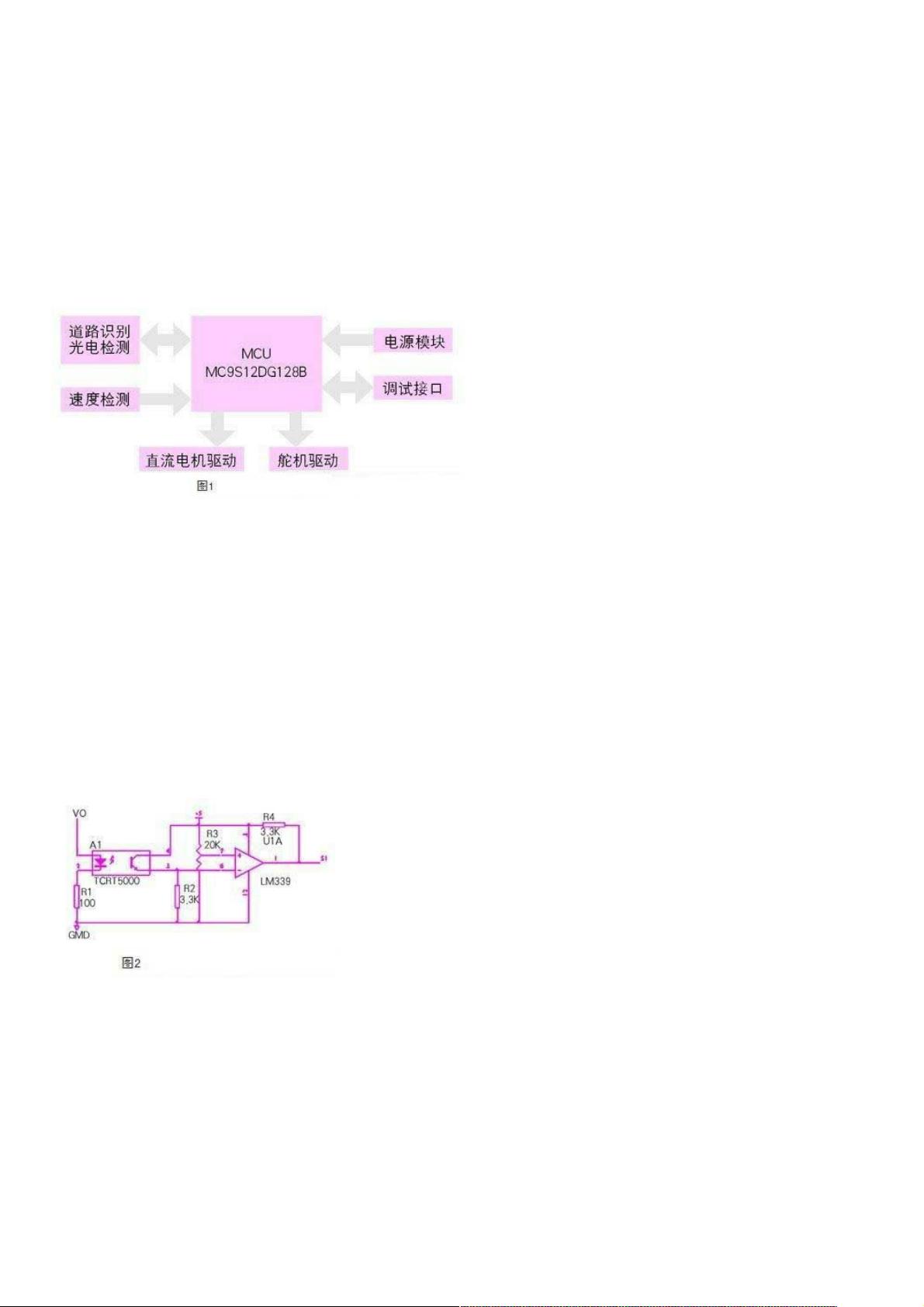
车模与控制器构成一个自动控制系统,如图1,系统硬件以单片机为核心,配有传感器、执行机构以及它们的驱动电路,而信
息处理与控制算法由单片机软件完成。系统设计要求单片机把路径的迅速判断、相应的转向伺服电机控制以及直流驱动电机的
控制精密的结合在一起。
智能车的设计是在保证模型车可靠运行的前提下,以电路设计简洁、车体灵活性高为原则。设计的两大重点,一是光电传感器
的布局和电路设计,一是循线控制算法的设计。
本文第二节主要介绍了光电传感器的电路设计和布局,这是信号采集的关键,相当于智能车的“眼睛”;第三节主要介绍了循线
控制算法,这是控制的核心,相当于智能车的“头脑”;最后在第四节对智能车的硬件、软件设计及实验情况进行了大体说明。
一、光电传感器一、光电传感器
光电传感器的选择及电路设计光电传感器的选择及电路设计
光电传感器位于智能车的最前方,起到预先判断路径的作用。其发射的光对白色和黑色有不同的反射率,因此能得到不同的电
压值,采进单片机后通过一定的算法比较电压来判断黑线的位置,从而控制舵机的转动。这种方法易于实现,响应速度快,实
时性好,成本低。
本文选用性价比基本适合的反射式红外传感器tcrt5000。红外光电传感器电路的设计形式多种多样,由于本文算法中采用的是
传感器阵列经验判断方法,为了控制简便采用数字量输出传感器电路,如图2所示。
光电管采用脉冲调制式发光,即vo是震荡电路产生的脉冲电压,这样易滤除外界干扰。虽然电路相对复杂,但足以保证模型
车的稳定行驶。
光电传感器布局的研究光电传感器布局的研究
光电管阵列的布局直接影响智能车的循线效果。一般来说,典型的布局有“一”字形布局和“w”形布局两种。
所谓“一”字形布局,就是把多个传感器按照“一”字排开。这种传感器布局方式最常见,算法在理论上易于实现。其不足之处在
于:对赛道的曲率几乎没有任何预测功能。因此一般不采用这种布局。
而“w”形布局,是把多个传感器按照“w”形排列。“w”形布局由于传感器分布在两排,使得智能车对弯道有一定的预测功能,这
种预测功能特别体现在直道进入弯道时刻。后一排传感器仍在直道时,前一排传感器已经进入弯道。而不足之处是增加了控制
算法的复杂程度,判断舵机的旋转方向时,往往需要上一次的检测数据。经验判断的可能性也随着传感器数量的增加而增加。
光电传感器布局仿真光电传感器布局仿真
下载后可阅读完整内容,剩余3页未读,立即下载
176 浏览量
点击了解资源详情
182 浏览量
2021-10-05 上传
479 浏览量
2021-09-24 上传
2021-09-08 上传
127 浏览量
2021-09-14 上传

weixin_38685455
- 粉丝: 5
- 资源: 922
 我的内容管理
展开
我的内容管理
展开







最新资源
- chat-app-master
- MAST-MOBILE:MAST Android应用程序源代码-Android application source code
- nanodegree-p3-classic-arcade-game:nanodegree-p3-classic-arcade-game
- Just_Java-app:这是我的第一拳Android项目,通过该项目,我通过Just Java应用程序了解了android的各种基础知识
- SIXSIGMA六标准差——教练级黑带师、黑带、绿带培训方案
- 数据营项目
- tool-conventions:支持使用WebAssembly的工具之间的互操作性的约定
- learn-bootstrap:这个 repo 是为我创建的,用于通过 tutorialls 学习引导程序
- FitJournal:Fit Journal应用程序的源代码-Android application source code
- 计时器
- 金融筹资管理
- thunderboard-android:这是Android的Thunderboard应用程序的源代码-Android application source code
- 网址缩短API登陆页面
- silverstripe-email_reminder:Silverstripe CMS的模块。 在用户的成员资格(或类似权限)即将到期时向用户发送提醒
- nodeschool.io:我对 NodeSchool.io 练习的解决方案
- ASCII-ART:产生与图像相对应的ASCII符号
