仿人机器人视觉里程计的误差修正与发展趋势
版权申诉
12 浏览量
更新于2024-06-29
收藏 968KB DOCX 举报
本文档主要探讨了在仿人机器人领域中实现实时里程计的问题,尤其是在基于物体路标的定位方法方面。移动机器人自定位是一个关键任务,对于提高机器人性能、降低成本和增强实用性至关重要。传统的轮式机器人里程计如UMBmark校准法、最小二乘法和路径比较法等,虽然在早期有着较高的精度,但由于累积误差问题,需要定期校正模型参数以维持其性能。
然而,随着仿人机器人技术的发展,尤其是双足行走的机器人,它们的运动模型更为复杂,仅依赖于编码器和IMU已无法满足高精度的需求。此时,视觉里程计和视觉SLAM技术成为研究热点。ORB-SLAM利用非线性优化和回环检测来校正视觉里程计的误差,而SVO则结合特征点法和直接法提升了实时性能。为了进一步解决单目视觉里程计的尺度不确定性,研究者开始集成IMU,形成了视觉惯性里程计(VIO),如OKVIS等。
文中提到,通过引入人工神经网络,可以实现对里程计模型的直接估计,这种方法更具鲁棒性和普适性,降低了对模型参数的依赖。同时,利用自适应扩展卡尔曼滤波(AEKF)来估计系统误差参数,为仿人机器人提供了更精准的定位解决方案。这对于在复杂环境中的导航和协作任务至关重要,因为仿人机器人在日常生活和工作场景中与人类互动的能力日益增强。
总结来说,本文档深入讨论了如何通过结合多种传感器数据、先进算法和自适应误差修正技术,实现仿人机器人在实际环境中的实时里程计,并强调了视觉里程计技术在解决其复杂运动模型误差问题中的核心作用。这对于未来仿人机器人技术的发展以及在人工智能、机器人协作和自主导航领域的应用具有重要意义。
已知路标物体中心在图像中的像素坐标(u,v)
T
及其世界坐标系坐标(x
w
,y
w
,z
w
)
T
,机器人的位姿解
算问题就是一个 n 点透视问题(perspective-n-point,PnP)
[18]
. 传统求解 PnP 的方法,如
P3P(perspective-three-point)、EPnP(efficient PnP)
[19]
,往往需要求解高阶方程组来计算相机三维位姿
(x,y,z,α,β,θ)且至少需要 3 对特征点,求解过程繁琐,运算量大. 一般地,仿人机器人在行走过程
中,质心高度基本保持不变,机器人(相机)的运动可以看作在一个二维水平面上的运动,其位姿只有 3 个
自由度:二维位置和姿态角. 本文根据简化的机器人模型和路标点之间的几何关系对机器人位姿进行估
计,算法总体时间复杂度为 O(1),相比传统方法,更加快速高效.
1.3.1 2D-3D 点求解
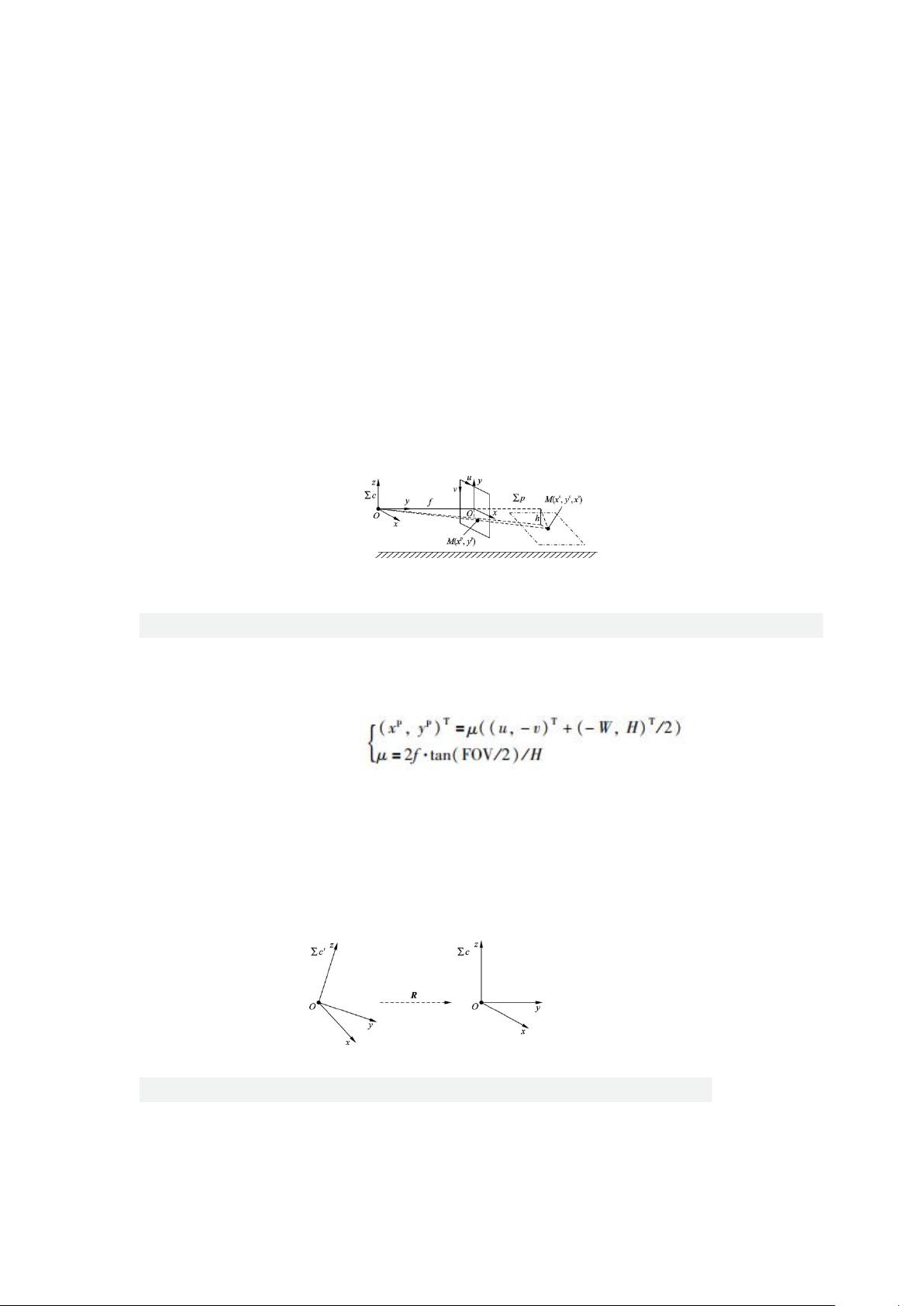
如图 4 所示,建立相机坐标系∑c 和图像坐标系∑p,物体路标中心 M 所在水平面与相机平面的垂直
高度差为 h,M 在相机坐标系下的坐标为(x
c
,y
c
,z
c
)
T
,在成像平面的投影坐标为(x
p
,y
p
)
T
. 机器人的结构
参数,相机的焦距 f,特征点的世界坐标(x
w
,y
w
,z
w
)
T
及其投影坐标(u,v)
T
均为已知量.
图 4 相机、图像坐标系与标识物体及投影点的几何关系 Fig.4 Geometric relationship among camera
coordinate system, image, landmark and its projection point
图选项
中心 M 点的像素坐标为(u,v)
T
,将之转化为图像坐标:
(3)
其中,(W,H)为图像的尺寸,FOV(field of view)为相机视场角.
一般地,仿人机器人头部存在 pitch、yaw 两个自由度,机器人的头部可能会转动,如图 5 所示,
需要对相机进行旋转矫正. 旋转矩阵为
图 5 相机的旋转修正 Fig.5 Correction for camera rotation
图选项
剩余19页未读,继续阅读
2023-09-08 上传
2023-02-23 上传
2023-09-30 上传
2022-11-29 上传

罗伯特之技术屋
- 粉丝: 4490
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- PureMVC AS3在Flash中的实践与演示:HelloFlash案例分析
- 掌握Makefile多目标编译与清理操作
- STM32-407芯片定时器控制与系统时钟管理
- 用Appwrite和React开发待办事项应用教程
- 利用深度强化学习开发股票交易代理策略
- 7小时快速入门HTML/CSS及JavaScript基础教程
- CentOS 7上通过Yum安装Percona Server 8.0.21教程
- C语言编程:锻炼计划设计与实现
- Python框架基准线创建与性能测试工具
- 6小时掌握JavaScript基础:深入解析与实例教程
- 专业技能工厂,培养数据科学家的摇篮
- 如何使用pg-dump创建PostgreSQL数据库备份
- 基于信任的移动人群感知招聘机制研究
- 掌握Hadoop:Linux下分布式数据平台的应用教程
- Vue购物中心开发与部署全流程指南
- 在Ubuntu环境下使用NDK-14编译libpng-1.6.40-android静态及动态库
