多线结构光中心线提取:系统空间约束下的高精度方法
版权申诉
本文主要探讨了一种基于系统空间结构约束的多线结构光条纹中心线提取方法,针对线结构光三维测量中的关键问题——精确提取条纹中心线。线结构光技术在智能制造、医学诊断和工业设计等领域具有广泛应用,其精度直接影响三维测量结果。
传统的方法包括几何重心法、阈值法、灰度重心法和Steger法。几何重心法和阈值法则利用光条纹在法线方向上的灰度分布特性,通过边缘检测和中间点选取来确定中心线,虽然速度快,但对噪声敏感且精度不高。灰度重心法考虑了局部区域的灰度平均值,但在处理噪声或亮度不均时,中心线提取精度会降低。Steger法基于Hessian矩阵,通过极值计算来定位中心,精度较高,但易受环境光干扰。
本文研究的系统采用相机垂直向下拍摄,发散型多线激光器倾斜投射,导致条纹中心线出现偏移。文章将中心线提取过程分为标定和测量两部分。标定阶段通过相机标定获取系统参数,计算条纹的偏移系数;测量阶段利用这些系数纠正条纹中心线偏移。然而,现有方法在有环境光的情况下易产生较大误差,本文旨在提高测量系统的抗干扰能力。
文章的核心方法是首先在无环境光条件下,采用Steger法进行粗提取,因为在这种条件下其精度高。然后,通过相机标定获取的系统空间结构参数,结合偏移系数对粗提取的中心线进行精化处理,并对处理后的点云数据进行进一步的误差分析,以确保提取的中心线尽可能准确反映物体表面的三维信息。
本文提出了一种兼顾精度和抗干扰能力的多线结构光条纹中心线提取方法,对于提升线结构光三维测量系统的稳定性和准确性具有重要意义。这种方法的实现有助于提高智能制造和医疗设备中的精确测量性能,促进相关领域的技术进步。
1.2 系统 空间结构 参数计算
1.2.1 相机镜头中心坐标计算
本文的世界坐标参考系是以相机中心为原点进行计算的,故相机镜头中心
坐标为(0, 0, 0)。
1.2.2 光斑中心的世界坐标的计算
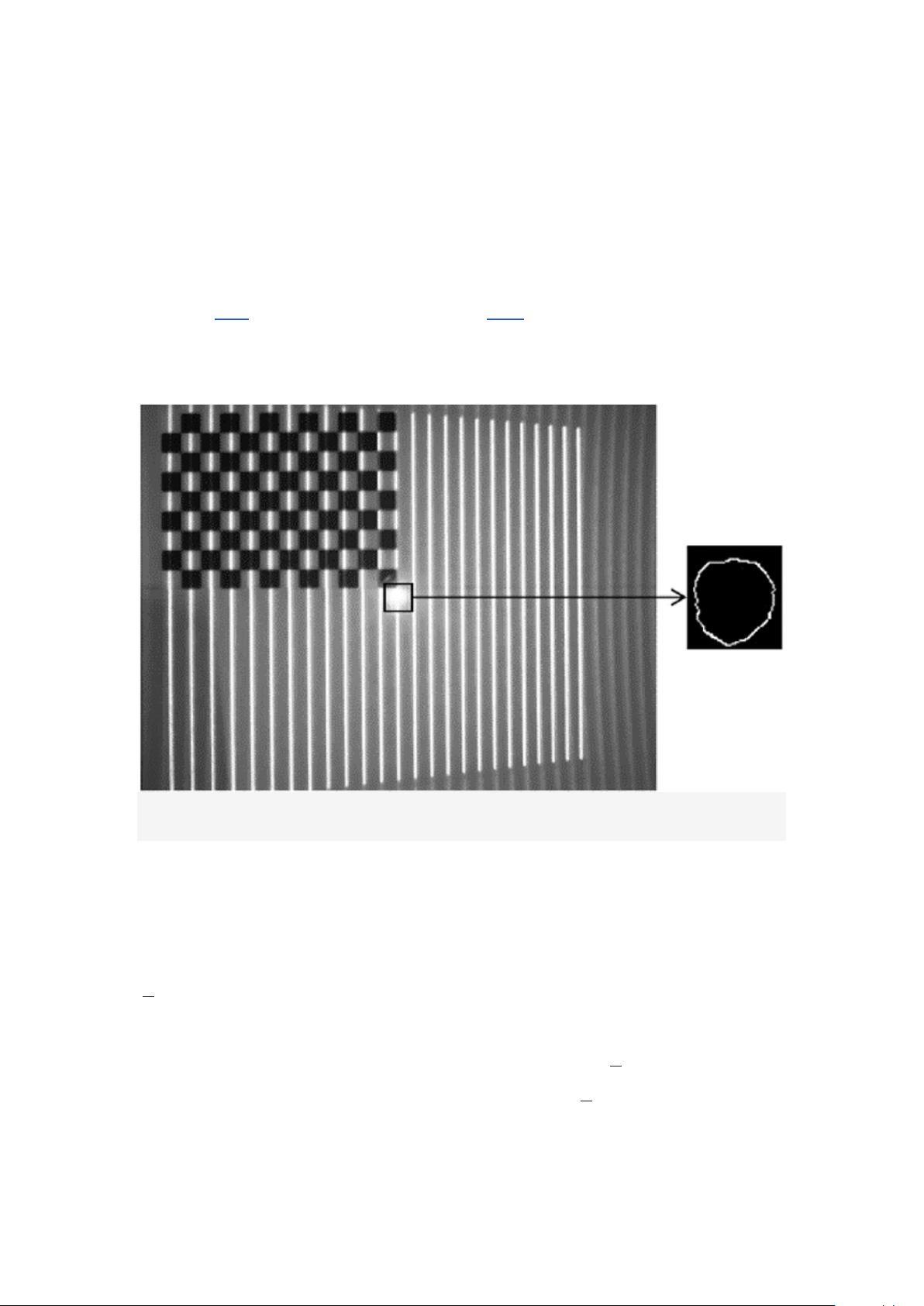
提取图 3(b)中的光斑边缘,ROI 图像如图 5 所示,均值提取光斑像素坐标,求
得光斑中心点的像素坐标,并转化为三维坐标(x
c
,y
c
,z
c
)。
图 5
图 5 图像边缘提取
Figure 5. Image edge extraction
1.2.3 激光器发射中心的世界坐标的计算
激光器发射中心的世界坐标的算法步骤如下:
步骤 1 采用 Steger 算 法提取 图中 3(b)中 L
12
和 R
12
条纹中心 线像素 坐标
[13]
,利用相机内、外参数将中心线的二维像素坐标转换为世界坐标系下的三维
坐标;
步 骤 2 通 过 随 机 抽 样 一 致 性 算 法
[14]
(Random Sample
Consensus,RANSAC)求得 L
12
和 R
12
所在光平面方程
[15]
;
步骤 3 将 L
12
和 R
12
所在的两条光平面相交,得到空间点向式直线方程
x-x0a= y-y0b= z-z0c
剩余23页未读,继续阅读
351 浏览量
2022-12-15 上传
2021-09-20 上传
2021-12-05 上传
2022-03-09 上传
2021-11-11 上传
2021-09-19 上传

罗伯特之技术屋
- 粉丝: 4558
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
