MATLAB中PID控制的磁悬浮系统建模与仿真优化
版权申诉
本文档深入探讨了MATLAB在磁悬浮系统建模与PID控制器设计中的应用。磁悬浮技术因其众多优势在众多高科技领域中扮演着关键角色,如能源、交通、航空航天等。本文首先概述了磁悬浮技术的基本原理和优势,强调了控制其稳定性的重要性。
作者以PID(比例-积分-微分)控制器作为核心控制策略,因为PID控制器因其结构简单、易于实现和良好的鲁棒性而在工业控制中占据主导地位。PID控制器的设计涉及到系统运动方程的分析,通过Simulink环境搭建磁悬浮系统的仿真模型,这一步骤旨在准确地模拟实际系统的动态行为。
在建立数学模型后,作者设置了具体的仿真参数,如质量矩阵M、系统常数X、磁滞系数I、比例增益K等,这些参数对于控制性能至关重要。通过对不同参数组合的分析,如比例P、积分I和微分D的比例调整,研究者能够优化控制器的响应时间和稳定性,确保系统达到最佳控制效果。
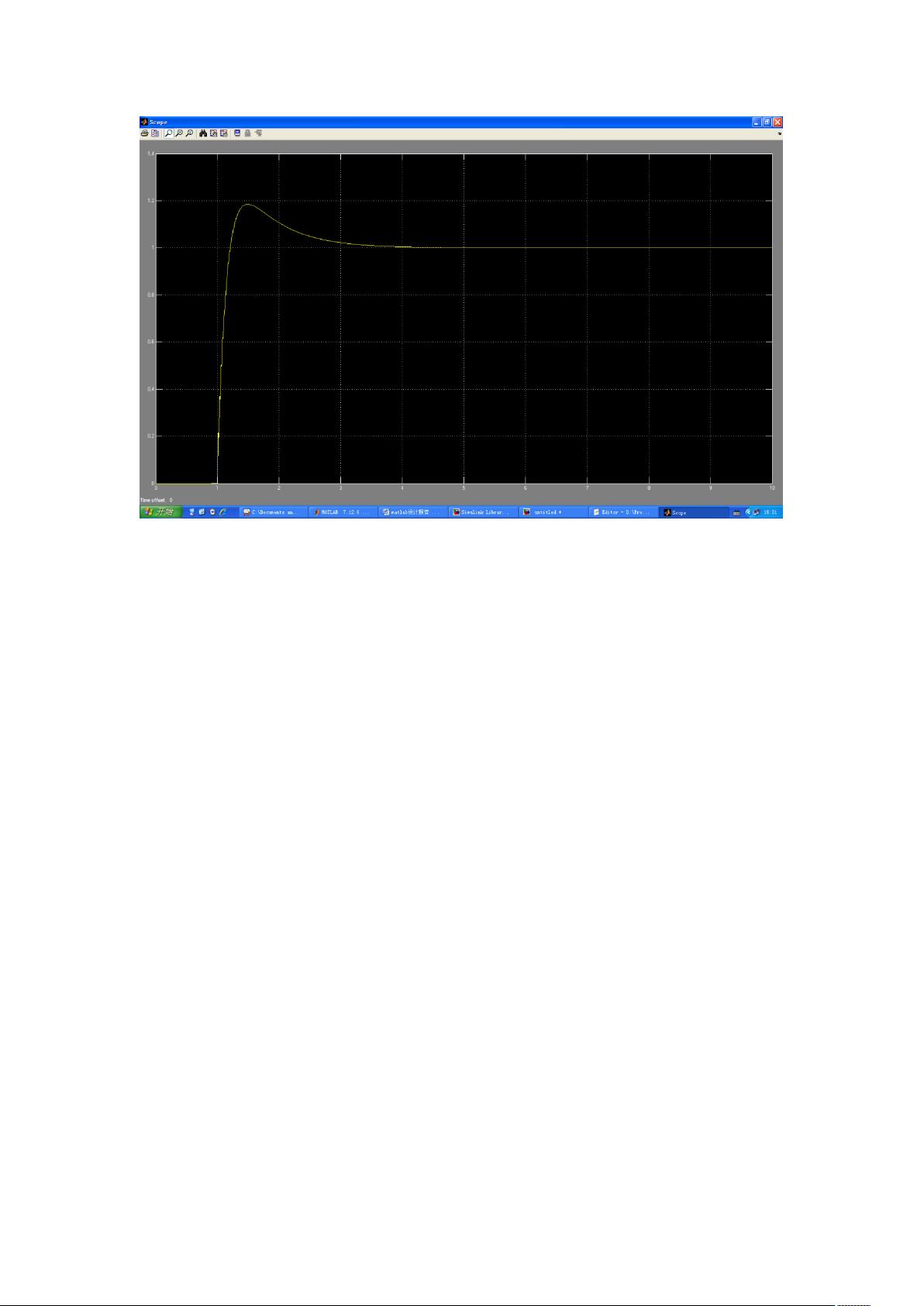
给出了两个不同设置的仿真参数示例,展示了PID参数对系统性能的影响,通过对比不同参数组合下的控制效果,可以找到最优控制参数组合。在仿真过程中,初始条件X0、阻尼系数R、电感L以及与PID参数相关的系数也起到了关键作用。
整个设计过程不仅包含了理论分析,还通过MATLAB的实际仿真操作,验证了控制策略的有效性和准确性。最后,作者反思了当前研究的局限性和未来可能的研究方向,提出结合新型控制器技术和更深入的系统分析来提升磁悬浮系统的控制性能。
总结来说,该文档详细介绍了如何在MATLAB环境中使用PID控制器设计磁悬浮系统的模型,通过仿真分析来优化控制参数,并展示了PID控制器在磁悬浮系统控制中的核心地位。这对于理解磁悬浮系统的控制策略和MATLAB在工程实践中的应用具有很高的价值。
2
M=0.13;
X=3e-3;
I=0.752;
K=1.28e-4;
X0=4.36e-3;
R=9.5;
L=0.3;
Kx0=2*K*I*I/(X+X0)^3;
Ki=2*K*I/(X+X0)^2;
P=8000;
I=9000;
D=900;
剩余10页未读,继续阅读
117 浏览量
219 浏览量
160 浏览量
141 浏览量
143 浏览量


阿里matlab建模师
- 粉丝: 5281
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易二维码签到系统:会议活动签到解决方案
- Ceres库与SDK集成指南:C++环境配置及测试程序
- 深入理解Servlet与JSP技术应用与源码分析
- 初学者指南:掌握VC摄像头抓图源代码实现
- Java实现头像剪裁与上传的camera.swf组件
- FileTime 2013汉化版:单文件修改文件时间的利器
- 波斯语话语项目:实现discourse-persian配置指南
- MP4视频文件数据恢复工具介绍
- 微信与支付宝支付功能封装工具类介绍
- 深入浅出HOOK编程技术与应用
- Jettison 1.0.1源码与Jar包免费下载
- JavaCSV.jar: 解析CSV文档的Java必备工具
- Django音乐网站项目开发指南
- 功能全面的FTP客户端软件FlashFXP_3.6.0.1240_SC发布
- 利用卷积神经网络在Torch 7中实现声学事件检测研究
- 精选网站设计公司官网模板推荐
