PMVS多视图立体匹配技术详解
"PMVS的ppt讲解"
PMVS(Patch-based Multi-view Stereo Software)是一个用于三维重建的算法,由Yasutaka Furukawa和Jean Ponce在2007年首次提出并开源。该算法专注于生成准确、密集且鲁棒的多视图立体匹配结果,适用于近景场景的重建。在2009年,PMVS发布了第二个版本,进一步提升了性能和适应性。
在PMVS中,输入是一组照片和相应的相机参数,输出是带有颜色信息的密集点云,每个点都有三维坐标和法向量。值得注意的是,PMVS能够自动忽略非刚性对象,如动态的人或物体,只重建静态的刚性结构。
1. PMVS简介
PMVS的核心在于通过比较不同视角的照片中的对应像素,利用多视图几何原理来估计三维空间中的点。它采用了基于补丁(patch-based)的方法,将图像中的一小块区域(patch)作为一个单位进行处理,提高了匹配的精度和稳定性。PMVS2是PMVS的一个优化版本,由Pierre Moulon修改,使其能在32位Windows系统下运行。
2. 基本概念
- 摄像机坐标系:摄像机坐标系的原点位于摄像机中心,Z轴指向摄像机的主光轴,即穿过图像平面的方向;X轴平行于图像平面的x轴,Y轴平行于图像平面的y轴。
- P矩阵:P矩阵是表示摄像机投影的3x4矩阵,包含了相机的内外参。它可以将三维世界坐标映射到二维图像平面上。如果已知摄像机的内外方位元素,可以计算出P矩阵。
- F矩阵: Fundamental Matrix,基础矩阵,是描述两个视图之间几何关系的3x3矩阵,用于两视图间的对应像素点的几何约束。
- patch:在PMVS中,patch是指图像中的一小块连续区域,通常用于局部特征的提取和匹配。
3. 算法流程
PMVS的算法大致分为以下步骤:
1. 特征匹配:通过SIFT、SURF等方法找到不同视图间对应的特征点。
2. 补丁创建:以特征点为中心,创建一系列的小图像块(patch)。
3. 补丁对齐:将所有视图的补丁进行对齐,以消除视差。
4. 立体匹配:对每个补丁,计算其在各个视图中的深度,采用随机样本一致性(RANSAC)或其他方法去除错误匹配。
5. 稠密重建:根据匹配的补丁,使用多视图几何方法扩展到整个图像,生成稠密的深度图。
6. 点云生成:将深度图转换为三维点云,同时估计点的法向量。
7. 后处理:去除噪声,如非刚性物体,优化点云的连续性和完整性。
PMVS是一种高效、准确的多视图立体匹配工具,特别适合近景场景的三维重建。通过理解其基本概念和工作流程,用户可以更好地运用PMVS进行实际的三维重建任务。
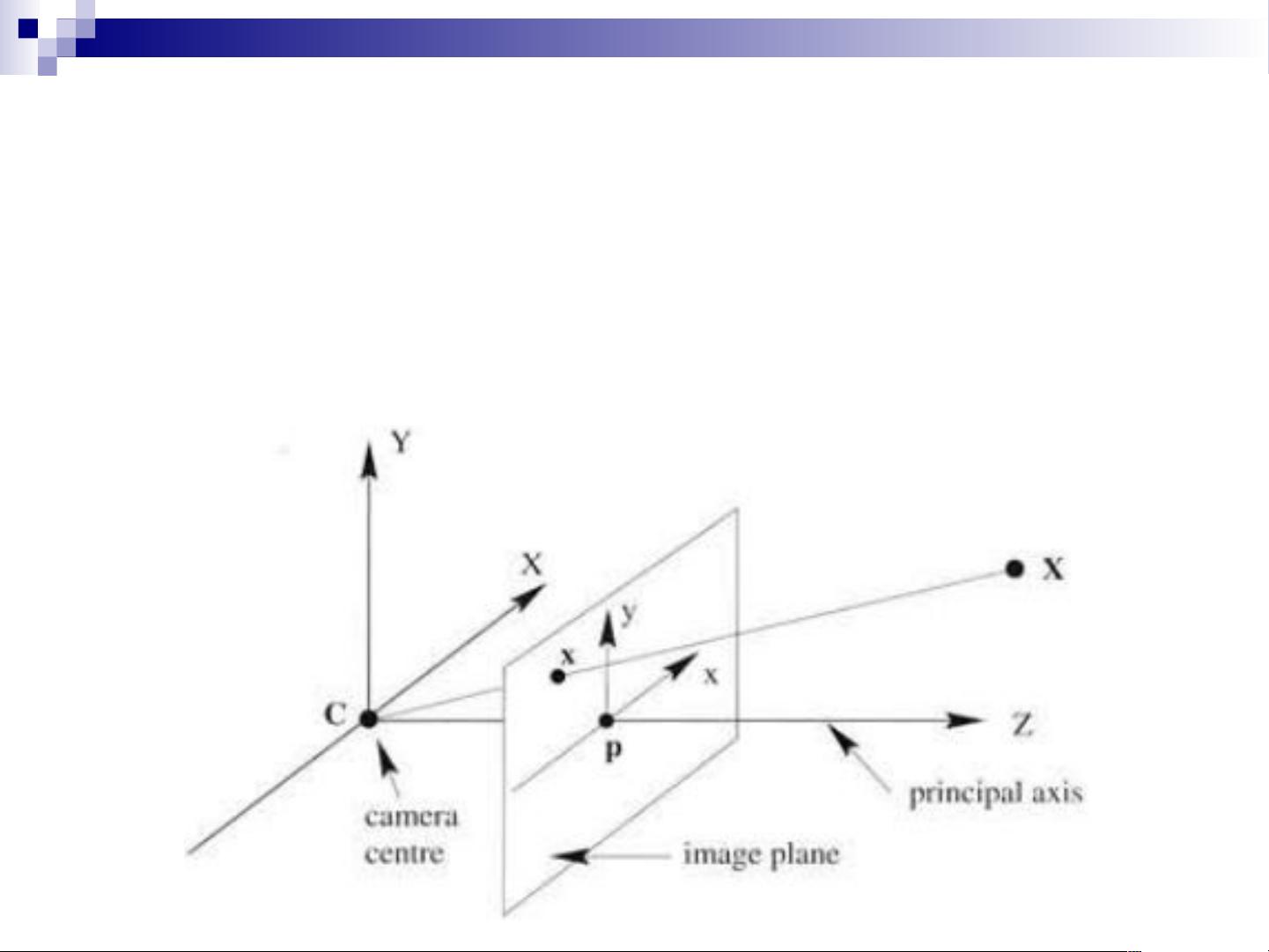
摄像机坐标系
原点为摄像机中心, 2 轴为过原点垂直于像平面的光线
3 主光轴 4 , 5 轴平行于像平面坐标系的 / 轴, 轴平行
于像平面坐标系的 6 轴。
! 基本概念:
剩余26页未读,继续阅读
2020-12-08 上传
119 浏览量
2022-07-14 上传
2017-02-11 上传
215 浏览量

jcjy666
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
