"基于51的避障循迹重力感应遥控的智能小车设计"
40 浏览量
更新于2024-01-23
收藏 3.1MB DOC 举报
本文介绍了一项基于51单片机的避障循迹重力感应遥控智能小车的设计。这项设计的选题背景是随着汽车工业的快速发展,智能小车的研究也越来越受到关注。全国范围内的电子大赛和省级电子大赛中,智能小车的题目几乎每次都有出现,并且各高校都非常重视这个研究方向。因此,本设计课题就是在这样的背景下提出的,并且指导老师已经做了充分的准备。
本设计课题是一项结合科研项目的设计类课题。设计的智能电动小车应该具备自适应能力,能够自动避障,并且能够智能规划路径。智能化是现代社会的新趋势,它可以根据预先设定的模式在特定的环境中自主运行,无需人为干预,能够达到预期的目标,甚至更高的目标。与遥控小车不同,智能小车无需人为控制转向、启停和进退,甚至一些更先进的遥控车还能控制车速。传统的模型小车属于遥控车的范畴,而智能小车则通过计算机编程来实现对行驶方向、启停和速度的控制,无需人为干预。操作者可以通过修改智能小车的计算机程序来改变其行驶方向。因此,智能小车具备再编程的特性,可以被看作是机器人的一种。
从1978年开始,中国将"智能模拟"作为国家科学技术发展规划的主要研究课题,并开始致力于智能化的研究。从概念引入到实验室研究的初期阶段,智能化的研究不断取得了新的突破和进展。智能小车作为智能化研究的一个具体应用,逐渐得到了越来越多的关注。
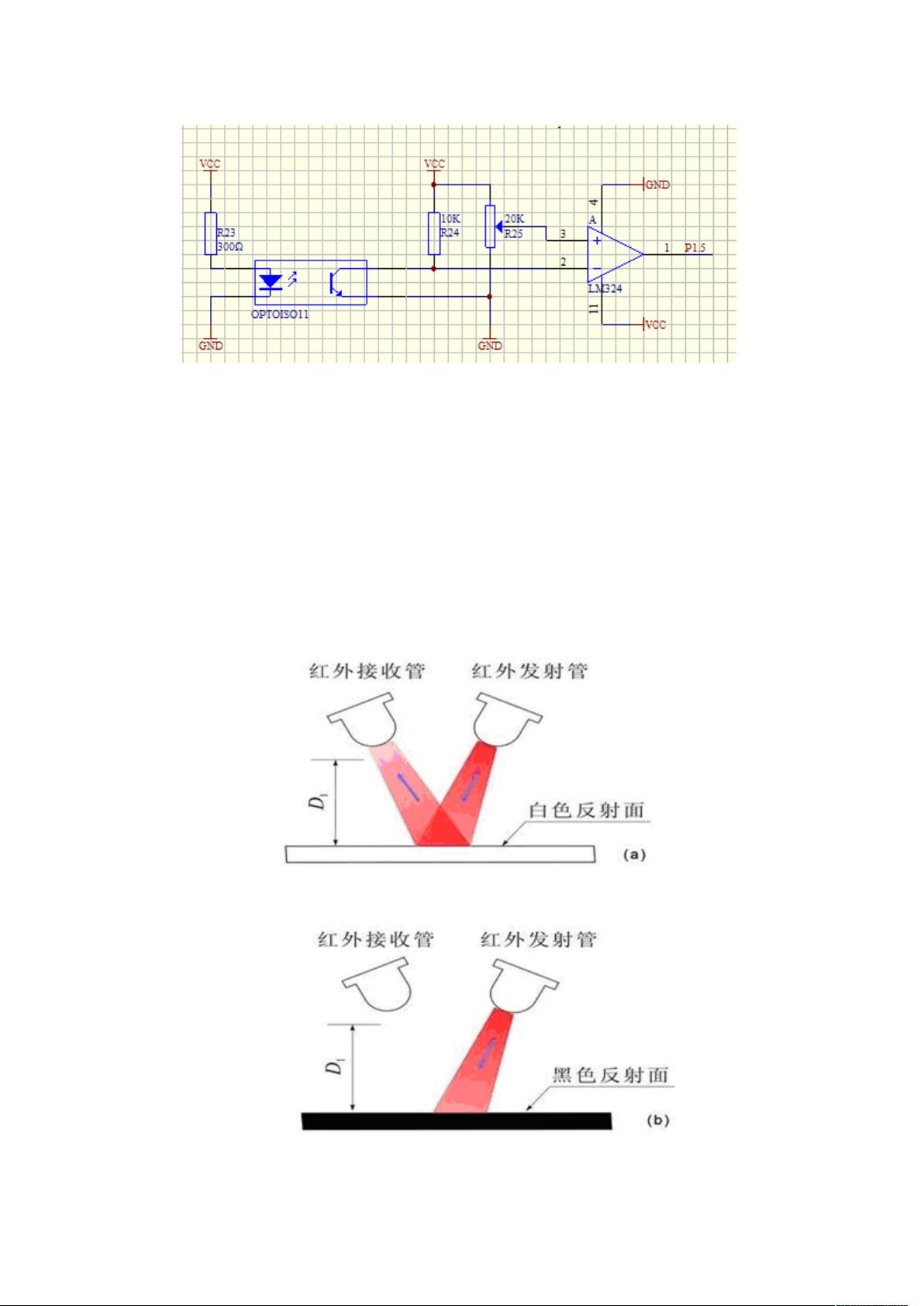
本设计采用了51单片机作为核心处理器,其他模块包括避障模块、循迹模块和重力感应遥控模块。避障模块通过超声波传感器来检测车辆前方的障碍物,当检测到障碍物时,智能小车会自动停下或转向避开障碍物。循迹模块通过光电传感器来检测车辆所处位置的黑线,根据不同的光电传感器的反馈信号,智能小车可以自主跟随或离开黑线行驶。重力感应遥控模块通过检测车辆的重力加速度来实现对车辆的遥控。
本设计的主要目标是使智能小车能够自主避障并按照预定路径行驶。通过编程控制,智能小车能够根据实时传感器信号进行决策,并且能够适应各种复杂的环境。设计师将使用C语言来编写智能小车的程序,并且将利用小车上的各种传感器和执行器来实现程序的功能。此外,本设计还将对智能小车进行实际测试,以验证其性能和可靠性。
通过这个设计项目,设计者可以深入了解智能化控制系统的原理和实现方法,掌握嵌入式系统的设计和开发技术,提高对C语言的编程能力。在实践中,设计者还可以培养自主学习和解决问题的能力,提升团队合作和沟通能力。
综上所述,本文简要介绍了一项基于51单片机的避障循迹重力感应遥控智能小车的设计。通过这项设计,设计者可以深入了解智能化控制系统的原理和实现方法,提高对嵌入式系统设计和开发技术的理解,提升编程和解决问题的能力。通过实际测试,设计者可以验证智能小车的性能和可靠性。这项设计的实施将带来更多对智能小车和智能化研究的进一步探索和应用。
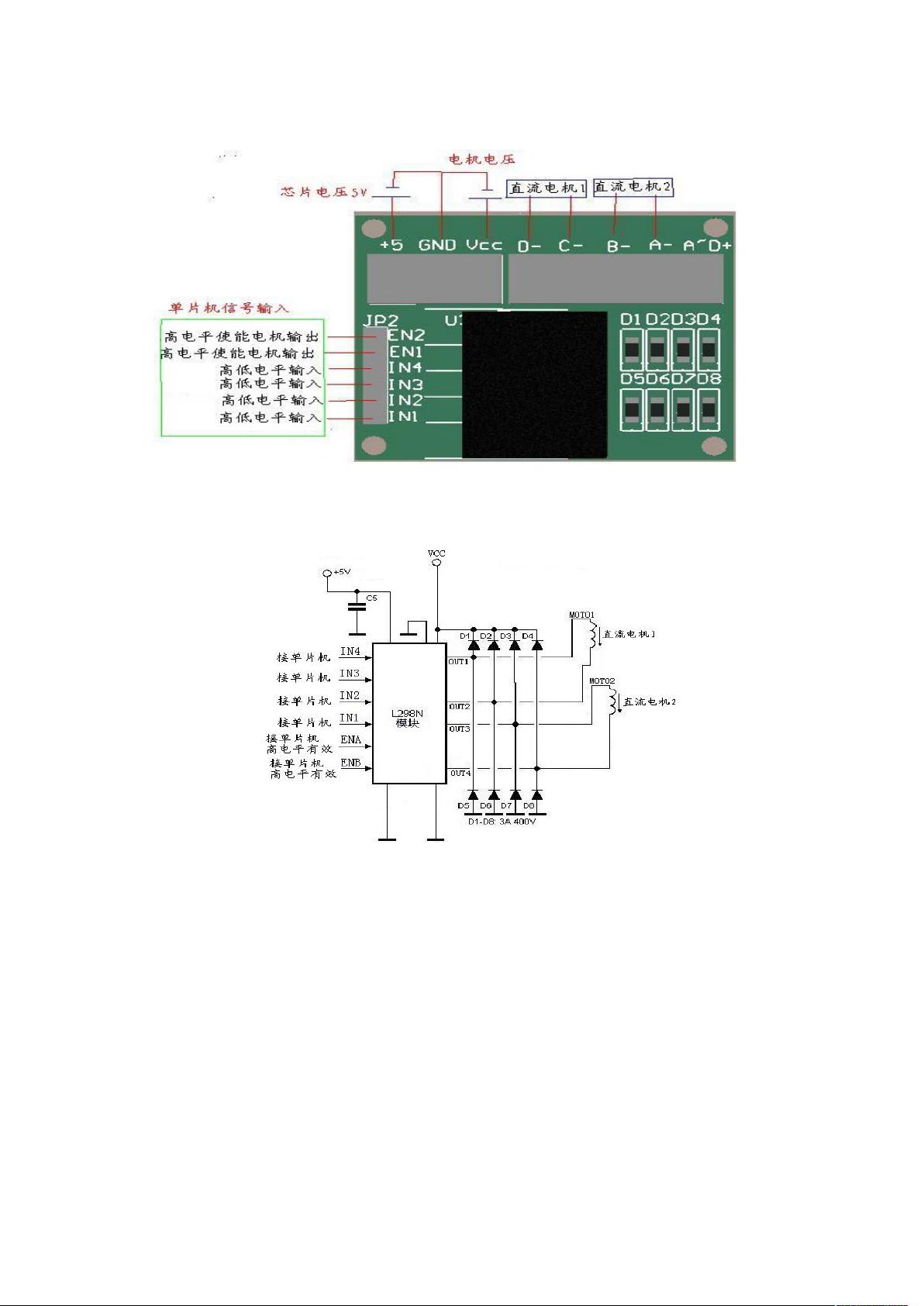
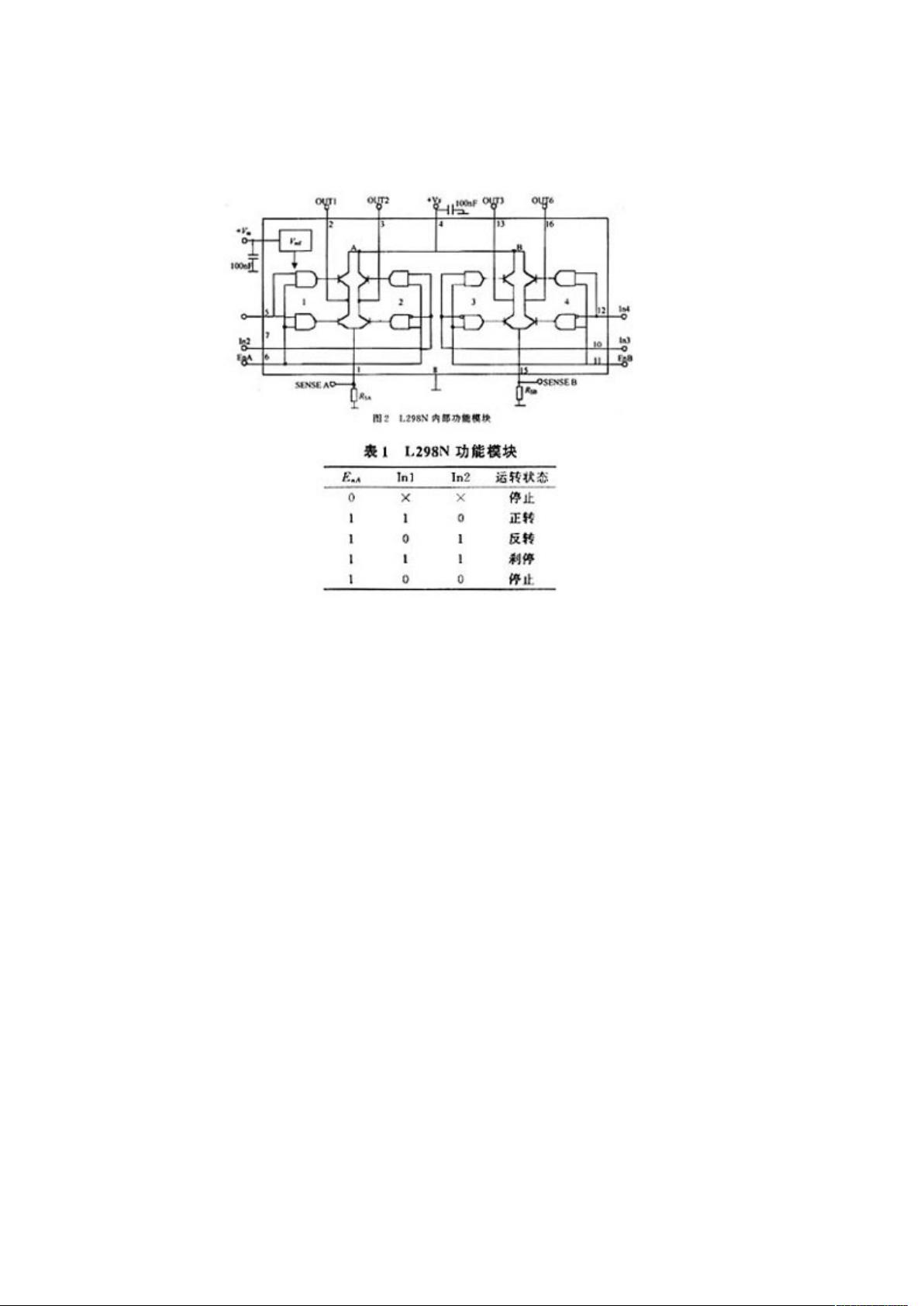
直流电机,实物图及外围电路如下图 6、7 所示。
图 6 L298N 芯片
图 7 L298N 外围电路
接口说明如下示:
+5V:芯片电压 5V。
VCC:电机电压,最大可接 50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了 VCC。
EN1、EN2:高电平有效,EN1、EN2 分别为 IN1 和 IN2、IN3 和 IN4 的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。
剩余56页未读,继续阅读
2023-05-27 上传
2023-05-27 上传
2023-07-10 上传
2023-07-10 上传
2021-09-16 上传
2023-07-10 上传
2023-07-06 上传

matlab大师
- 粉丝: 2736
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
