PID控制器原理与应用
需积分: 10 104 浏览量
更新于2024-09-09
收藏 129KB PDF 举报
"PID算法控制"
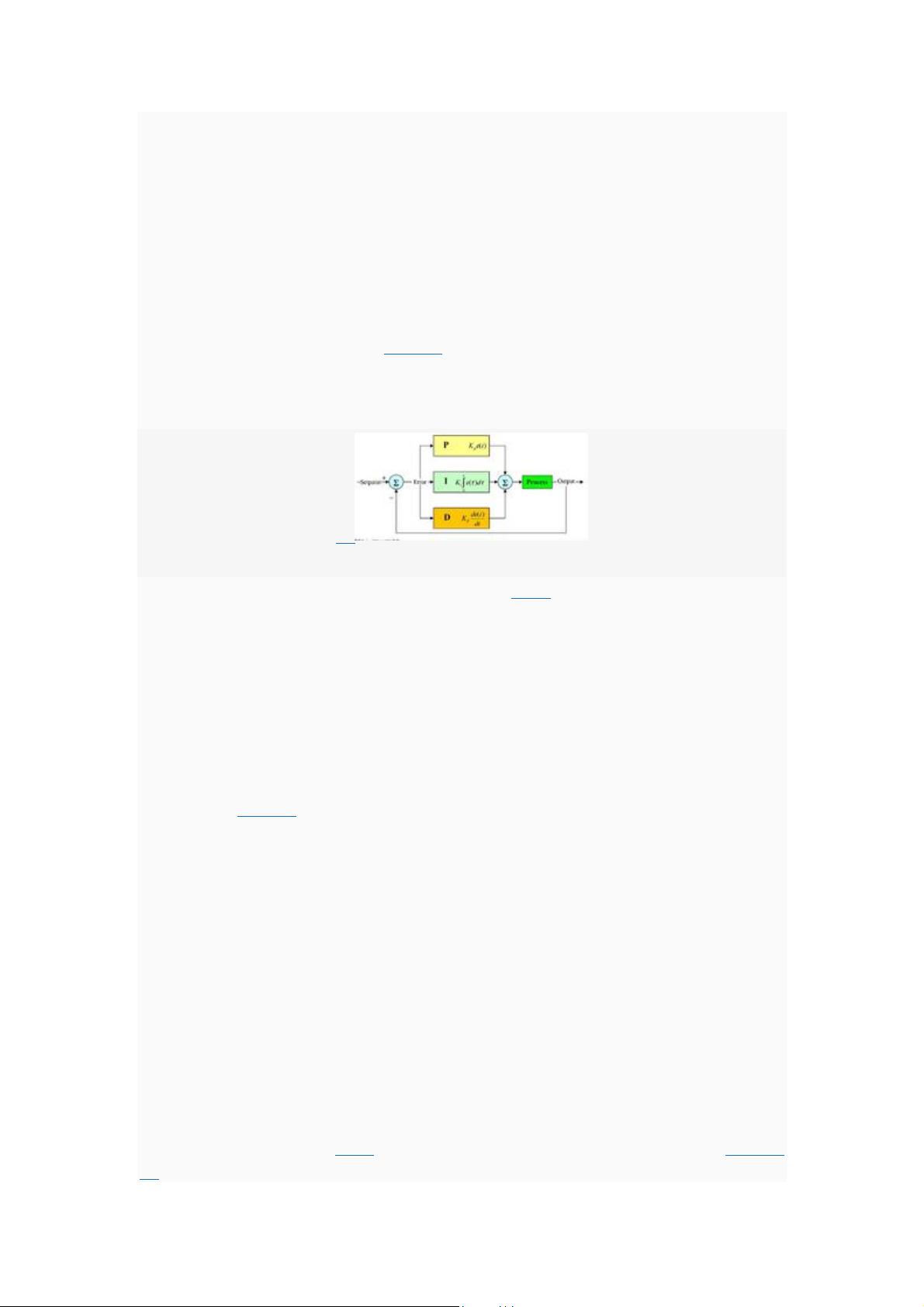
PID(比例-积分-微分)控制算法是自动化领域中最基本且广泛应用的控制策略,其在各种工业生产环境中扮演着关键角色,如温度、压力、流量、液位等参数的精确控制。PID控制器通过集成比例(P)、积分(I)和微分(D)这三个单元,能够对系统的偏差进行有效调节,从而确保被控变量的实际值与设定值保持一致。
1. 比例单元(P):这一部分负责即时响应,根据当前的误差大小来调整控制量。比例系数Kp决定了响应的速度和幅度,较大的Kp会使系统响应更快但可能导致系统振荡。
2. 积分单元(I):积分单元关注误差的累积,随着时间的推移,它能消除系统的稳态误差。积分系数Ki控制积分作用的强度,较大的Ki可以提高系统的稳态性能,但可能导致系统过于缓慢或产生振荡。
3. 微分单元(D):微分单元预测误差的变化趋势,提前进行补偿,以减少超调和振荡。微分系数Kd决定预测和补偿的程度,适当的Kd可以使系统响应更加平滑,但也可能增加系统的噪声敏感性。
选择合适的PID控制规律对实现良好的控制效果至关重要。在面对非线性或动态特性随时间变化的系统时,可能需要采用更复杂的控制策略。然而,对于许多基本线性系统和静态特性稳定的情况,PID控制仍是最为实用的。
PID控制器通过不断收集数据并对比参考值,计算出新的输入值以调整系统状态。其优势在于不仅考虑当前误差,还考虑了过去误差的平均值和未来误差的预测,从而提供更准确和稳定的控制。PID控制器的设计通常涉及三个参数(Kp,Ki,Kd)的精细调整,这往往需要基于实际系统特性和运行条件的经验调试。
反馈回路是PID控制器的基础,包括传感器、控制器和执行机构三部分。传感器监测系统状态,控制器计算误差并决定纠正值,执行机构则根据纠正值调整系统。PID回路中的三个算法(比例、积分和微分)共同作用,以实现快速、无误差的系统响应。
PID控制器广泛应用于各种工业场景,如水箱水位控制、温度控制、压力管理等。例如,汽车的巡航控制系统就是一个实际的PID应用案例,它持续调整车辆速度以保持设定的行驶速度。此外,PID控制器还可以串联使用,处理更复杂的多变量控制问题,以实现更精细的系统管理。
总结来说,PID算法是一种强大的控制工具,适用于多种工业控制环境,通过精确调节和反馈机制,能够在各种工况下保证系统性能的稳定和高效。尽管现代控制理论中存在更先进的控制策略,但PID控制因其简单、灵活和有效性,仍然在实践中占据主导地位。
PID 控制器
工业生产过程中,对于生产装置的温度、压力、流量、液位等工艺变量常常要求
维持在一定的数值上,或按一定的规律变化,以满足生产工艺的要求。PID 控制
器是根据 PID 控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值
与工艺要求的预定值一致。不同的控制规律适用于不同的生产过程,必须合理选
择相应的控制规律,否则 PID 控制器将达不到预期的控制效果。
PID控制器(比例-积分-微分控制器),由比例单元 P、积分单元 I 和微分
单元 D 组成。通过Kp, Ki和Kd三个参数的设定。PID控制器主要适用于基
本线性和动态特性不随时间变化的系统。
PID 控制器是一个在工业控制应用中常见的反馈回路部件。这个控制器把收
集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,
这个新的输入值的目的是可以让系统的数据达到或者保持在参考值。和其他
简单的控制运算不同,PID控制器可以根据历史数据和差别的出现率来调整
输入值,这样可以使系统更加准确,更加稳定。可以通过数学的方法证明,
在其他控制方法导致系统有稳定误差或过程反复的情况下,一个PID反馈回
路却可以保持系统的稳定。
反馈回路基础
一个控制回路包括三个部分:
系统的传感器得到的测量结果 控制器作出决定 通过一个输出设备来
作出反应 控制器从传感器得到测量结果,然后用需求结果减去测量结果来
得到误差。然后用误差来计算出一个对系统的纠正值来作为输入结果,这样
系统就可以从它的输出结果中消除误差。
在一个 PID 回路中,这个纠正值有三种算法,消除目前的误差,平均过
去的误差,和透过误差的改变来预测将来的误差。
比如说,假如一个水箱在为一个植物提供水,这个水箱的水需要保持在
一定的高度。一个传感器就会用来检查水箱里水的高度,这样就得到了测量
结果。控制器会有一个固定的用户输入值来表示水箱需要的水面高度,假设
这个值是保持 65%的水量。控制器的输出设备会连在一个马达控制的水阀门
上。打开阀门就会给水箱注水,关上阀门就会让水箱里的水量下降。这个阀
门的控制信号就是我们控制的变量,它也是这个系统的输入来保持这个水箱
水量的固定。
PID控制器可以用来控制任何可以被测量的并且可以被控制变量。比如,
它可以用来控制温度,压强,流量,化学成分,速度等等。汽车上的巡航定
速功能就是一个例子。
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-08-09 上传
2010-05-15 上传
169 浏览量
2012-07-30 上传
2022-09-23 上传
2024-01-17 上传

前排炮灰兵_Haven
- 粉丝: 14
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
