模块化机器人实验指南:从控制卡到避障机器人
版权申诉
78 浏览量
更新于2024-06-23
收藏 7.46MB DOC 举报
"“创意之星”模块化机器人实验指导书详细涵盖了多个与机器人设计、编程及控制系统相关的实验。这些实验旨在帮助学习者深入了解机器人技术的基础,包括硬件组件、控制卡编程、传感器应用和机器人行为控制等方面。
实验一:MultiFLEX控制卡编程实验
这个实验的目标是让学生熟悉MultiFLEX控制卡的基本构造,掌握WinAVR+AVRStudio编程环境的使用。通过编写C语言程序并将其下载到控制卡中执行,学习者能了解AVR单片机的I/O口寄存器概念,以及如何利用gpio_mode_set()、write_gpio()和read_gpio()这三个函数来控制16路I/O口。实验所需的设备包括计算机、MultiFLEX控制卡、相关连接线以及舵机等,为学生提供了一个实践操作的平台。
实验二:多自由度串联式机械手
本实验涉及机械手的设计与控制,重点在于理解多关节机械臂的工作原理和运动控制。通过搭建和编程,学习者将能够实现机械手的精确动作,进一步理解机械结构和伺服电机的协同工作。
实验三:简易四足机器人
四足机器人的构建和控制是一个复杂而有趣的任务,该实验让学生学习到动物运动仿生学以及如何通过编程实现机器人步态控制。这有助于提升对动态平衡和运动规划的理解。
实验四:轮式机器人运动控制实验
此实验围绕轮式机器人的运动控制,包括直线行驶、转弯等基本操作。学生将学习如何通过编程实现速度控制和路径规划,为后续的自主导航打下基础。
实验五:机器人传感系统实验
在这一实验中,学生会接触到各种传感器,如超声波传感器、红外传感器等,学习如何集成传感器数据进行环境感知,为机器人赋予“视觉”。
实验六:自主避障机器人实验
这个实验是基于前面的传感系统实验,更进一步地,学生需要设计和实现一个能自动避开障碍物的机器人,涉及路径规划和实时决策算法。
实验七:追光的机器爬虫
通过让机器人追踪光源,学生将学习光敏传感器的应用,以及如何实现光跟踪策略,提高机器人的自主行为能力。
实验八:开放性实验:设计自己的机器人
这是一个综合性的实验,鼓励学生发挥创新精神,设计并制作属于自己的机器人,这将锻炼他们的独立思考和问题解决能力。
这份实验指导书提供了一个全面的机器人教育框架,从基础的控制卡编程到高级的自主行为设计,为学习者提供了丰富的实践机会,有助于培养他们在IT特别是机器人领域的专业技能。通过这些实验,学生不仅能掌握理论知识,还能积累实践经验,为未来在机器人领域的发展奠定坚实基础。
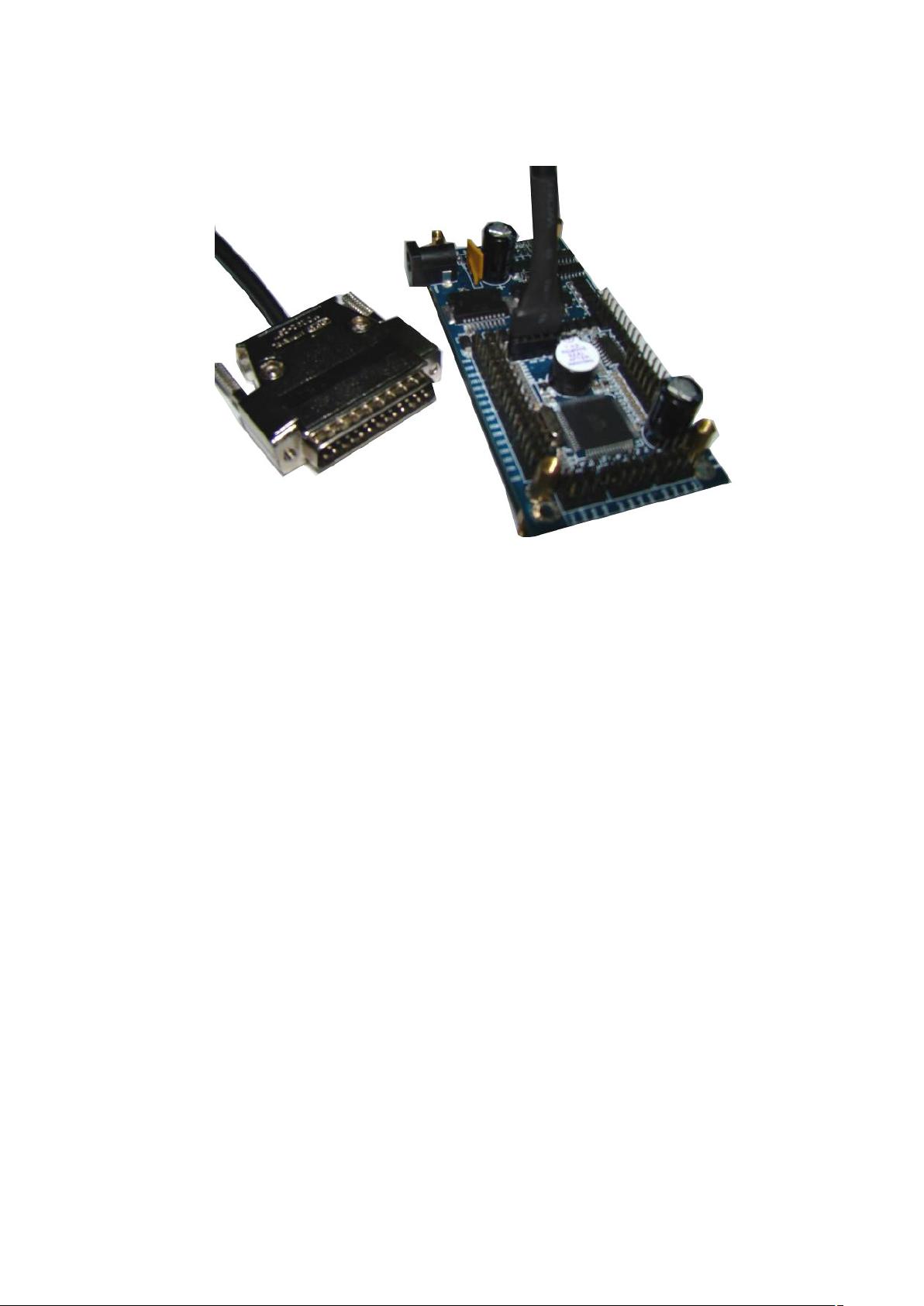
下图是MultiFLEX 控制卡的功能区域图,将下载线的5 针插头与其中的H 区
的5 针插头相连接,注意线序
连接完成后给控制卡通上电源(程序烧写过程中不允许断电,请确保电源的
可靠性)。然后在刚才打开的PonyProg2000 中点击“File——》Open Device File”
或 者 点 击 图 标 打 开 我 们 前 面 生 成 的 test.hex 文 件 ( 应 该 在
“D:\test\test\default”文件夹中),然后点击“Command——》Write All”
或者点击图标,然后程序就会开始烧写至控制卡里面,烧写过程如下图:
当PonyProg2000 显示烧写成功时我们的第一个实验程序就顺利的烧写进
MultiFLEX 控制卡中了,正常情况下我们会听到控制卡蜂鸣器发出急促的“嘟嘟
嘟”的声音,如果没有任何现象请你检查以上步骤是否按要求完成或者检查下载
线有没有插反、控制卡是否正常供电,修改有问题的地方后再生成hex 文件进行
烧录,直至蜂鸣器出现规则的嘟嘟声为止。
4 编写C 程序实现对16 路I/O 口的控制
I/O 口(In/Out 口)是数字电路的重要组成部分之一,通过I/O 口,我们可以
控制端口的电平变化,也可以对端口的电平信息进行读取。在机器人人领域对I/O
口的操作更是无处不在,那么针对创意之星的MultiFLEX 控制卡我们怎么通过编
写c 与程序对其I/O 口进行操作呢,我们将在本小节对其进行介绍。
首先我们来简单了解一下AVR 单片机与I/O 口有关的寄存器。AVR 单片机与
I/O 口有关的寄存器有3 个:PORTX,DDRX,PINX(X 为端口编号)。
DDRX 说明X 端口的输入输出状态,例如:如PORTA=0x0F=0000 1111,则引脚
PA0-PA3均为输出(1 为输出),引脚PA4-PA7 均为输入(0 为输入)。
PORTX 说明X 端口的输入输出的具体信息,例如:当PORTA=0x0F 时,若
PORTA=0X33=00110011,则引脚PA0、PA1 为输出,且输出信号为高(1);引脚
PA2、Pa3 为输出,但输出信号为低(0);PA4、PA5 为输入且输入有效;至于
PA6、PA7 虽然DDRA 已经将其设置为输入,但是PORTA 使其输入无效,所以PA6、
PA7 的输入信号读不出来。
剩余49页未读,继续阅读
2023-07-12 上传
2023-07-15 上传
2023-07-12 上传
2022-07-11 上传
2022-11-22 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
