PID控制器的抗饱和积分设计与避免策略
下载需积分: 5 | PDF格式 | 1.16MB |
更新于2024-08-03
| 78 浏览量 | 举报
本文档探讨了控制算法中的一个关键问题——PID控制器(Proportional-Integral-Derivative)在处理饱和问题时的抗饱和积分策略。作者L. Rundqwist,来自瑞典隆德理工大学自动控制系,针对控制系统在实际应用中常见的非线性特性,即在大范围的设定点变化和扰动下控制信号可能出现饱和,导致反馈回路中断、系统进入开环运行的问题,提出了多种避免积分器饱和的方法。
首先,作者从实践角度出发,介绍了几种临时或特定情况下的解决方案,这些方案通常是在设计中考虑的一些简单但针对性较强的抗饱和措施。这些可能包括但不限于限幅器、死区补偿、周期性切换积分器模式等,这些方法各自有其适用场景,但可能缺乏全局性和通用性。
然后,文章转向了一个更为系统化的方法,即开发了一种通用的抗饱和策略,它试图统一处理PID控制器在饱和条件下的行为。这种策略旨在确保在控制信号受限时,控制器仍能维持稳定性和良好的动态响应。通过理论分析和仿真测试,作者提出了一套设计规则,旨在指导如何有效地集成抗饱和机制到PID控制器中,以减小饱和对控制性能的影响。
关键词“PID控制”、“过程控制”、“饱和”和“实施”突出了文章的核心关注点,表明研究的焦点在于PID控制器在实际工业过程控制中的稳健性和实用性,尤其是在面临信号饱和时的控制器设计与优化。
本文不仅提供了丰富的实践经验,还提供了一种潜在的标准化方法,以改进PID控制器在复杂工况下的抗饱和性能,这对于工业自动化和控制系统的设计者来说具有重要的参考价值。通过对抗饱和积分策略的深入研究,本文有助于提升控制系统的可靠性和稳定性,从而避免因饱和引起的潜在风险。
Co
pyright ©
IF
AC 11th
Tri
ennial World
Co
ngress,
Ta
lli
nn.
ESlOn
ia, USS R. 1990
ANTI-RESET
WINDUP
FOR
PID
CONTROLLERS
L.
Rundqwist
Department
of
Automatic Cont
rol,
Lund
Institute
of
T
echno
l
ogy,
p.a. B
ox
11
8,
5-22100 Lund, Sweden
Abstract.
This
paper
describes
and
compares
a
number
of
ways
of
avoiding
integrator
windup
for
proportional-integral-derivative
(PID)
controllers.
It
covers
both
a
number
of
ad
hoc
schemes
and
a
general
procedure
to
avoid
windup,
which
admits
a
unification
of
the
ideas. Design rules for
anti-windup
in
general
purpose
PID
controllers
are
derived
and
tested
in
simulations
and
experiments.
Keywords:
PID
control, process control,
saturation,
implementation
1.
Introduction
Most
control
systems
are
designed for
operation
in
the
linear
range.
For
large
set
point
changes
and
disturbances
the
control
signal will however
be
saturated,
and
then
the
system
operates
in
open
loop
since
the
feedback
path
is broken.
If
the
controller
is
unstable
the
breakup
of
the
loop
may
give severe consequences. A
PID
controller
is a
typical
example
of
a controller
that
may
cause
instability
or
poor
transient
output
during
saturation.
This
paper
presents
design rules for
anti-
wind
up
compensators
in
general
purpose
PID
controllers.
The
rules
are
based
on
the
con-
troller's
performance
for a special
disturbance.
They
are
important
for controllers
that
may
be
utilized
on
a
variety
of
processes.
2.
Anti-windup
methods
for
PID
controllers
A few
methods
for avoiding
integrator
windup
will
be
briefly described.
They
are
described
in
more
detail
in
Astrom
and
Rundqwist
(1989).
Conditional
integration
methods
In
these
methods
the
integrator
is
updated
only
during
certain
conditions.
The
essential differ-
ences
between
the
methods
are
the
exact
con-
ditions
for
suspending
and
resuming
integration,
and
how
the
integral
part
i~
treated
when
it
is
453
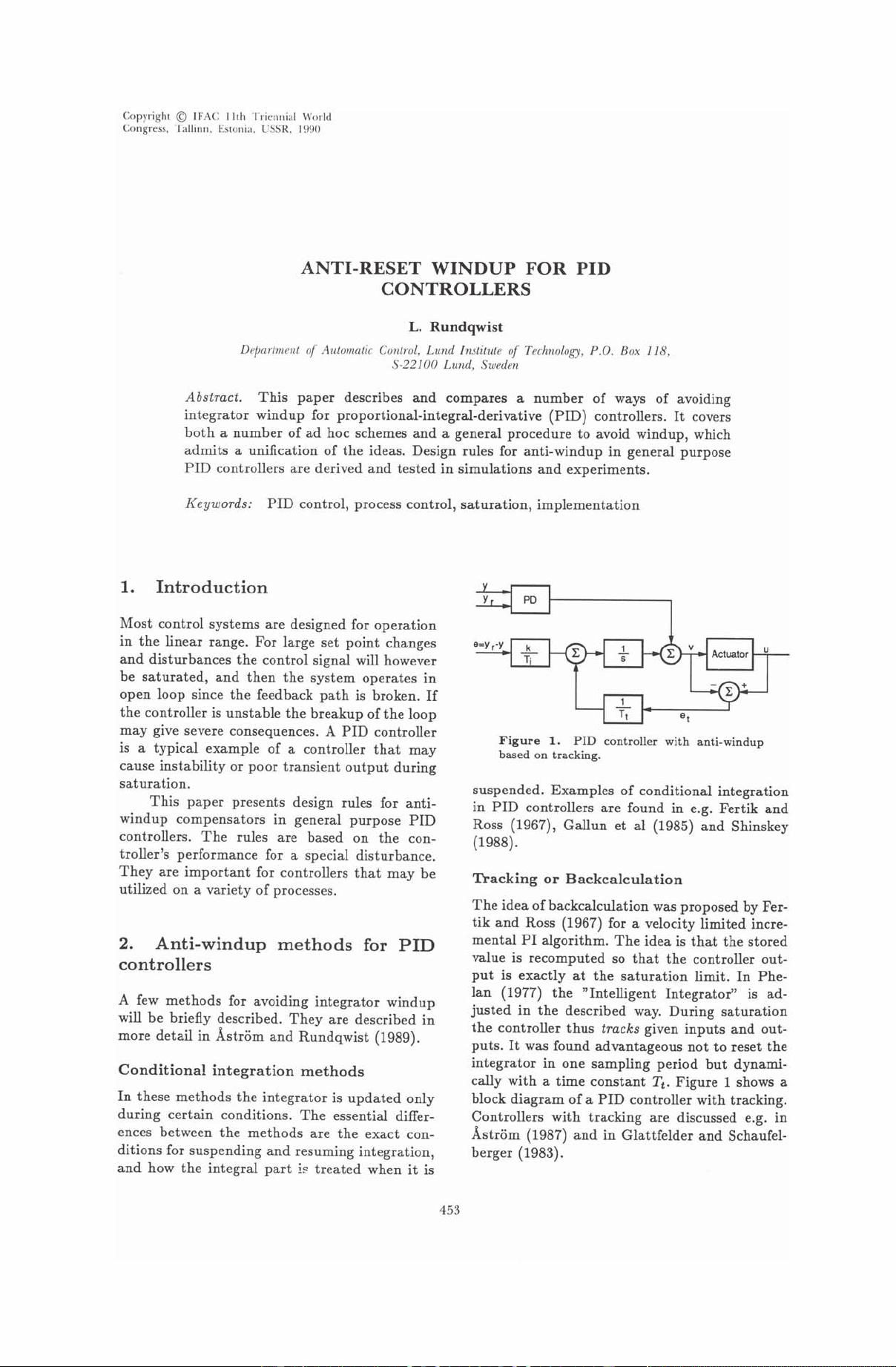
Figure
1.
PIn
controller
with
anti-wind
up
based
on
tracking.
suspended.
Examples
of
conditional
integration
in
PID
controllers
are
found
in
e.g.
Fertik
and
Ross (1967),
Gallun
et
al
(1985)
and
Shinskey
(1988).
Tracking
or
Backcalculation
The
idea
of
backcalculation
was
proposed
by
Fer-
tik
and
Ross (1967) for a velocity
limited
incre-
mental
PI
algorithm.
The
idea
is
that
the
stored
value is
recomputed
so
that
the
controller
out-
put
is
exactly
at
the
saturation
limit.
In
Phe-
lan
(1977)
the
"Intelligent
Integrator"
is
ad-
justed
in
the
described
way.
During
saturation
the
controller
thus
tracks given
inputs
and
out-
puts.
It
was found
advantageous
not
to
reset
the
integrator
in
one
sampling
period
but
dynami-
cally
with
a
time
constant
Tt.
Figure
1 shows a
block
diagram
of
a
PID
controller
with
tracking.
Controllers
with
tracking
are
discussed e.g.
in
Astrom
(1987)
and
in
Glattfelder
and
Schaufel-
berger
(1983).
下载后可阅读完整内容,剩余5页未读,立即下载
相关推荐


大强强小强强
- 粉丝: 805
 我的内容管理
展开
我的内容管理
展开







最新资源
- A7Demo.appstudio:探索JavaScript应用开发
- 百度地图范围内的标注点技术实现
- Foobar2000绿色汉化版:全面提升音频播放体验
- Rhythm Core .NET库:字符串与集合扩展方法详解
- 深入了解Tomcat源码及其依赖包结构
- 物流节约里程法的文档整理与实践分享
- NUnit3.vsix:快速安装NUnit三件套到VS2017及以上版本
- JQuery核心函数使用速查手册详解
- 多种风格的Select下拉框美化插件及其js代码下载
- Mac用户必备:SmartSVN版本控制工具介绍
- ELTE IK Web编程与Web开发课程内容详解
- QuartusII环境下的Verilog锁相环实现
- 横版过关游戏完整VC源码及资源包
- MVC后台管理框架2021版:源码与代码生成器详解
- 宗成庆主讲的自然语言理解课程PPT解析
- Memcached与Tomcat会话共享与Kryo序列化配置指南
