PD自适应轨迹跟踪算法在多关节机器人控制中的应用与仿真
版权申诉
53 浏览量
更新于2024-06-23
收藏 1.57MB DOC 举报
"基于PD的多关节机器人控制器设计与仿真"
在多关节机器人控制领域,基于比例微分(PD)的控制器是一种广泛应用的方法,因为它结构简单、易于实施,并且具有良好的实时性能。本课题深入探讨了一种全局指数收敛的PD自适应轨迹跟踪算法,这种算法在设计上具有独特的优势。它无需定义虚拟参考轨迹,而是直接利用机器人的期望轨迹来进行跟踪,这降低了在线计算的复杂性,使得计算任务可以在系统运行前预先完成。
传统PD控制器通常需要精确的系统模型,包括所有动态参数,但在实际应用中,这些参数往往难以准确获取,且系统存在不确定性。本课题的创新之处在于,它不需要确定不确定参数,只需要知道动力学模型的结构。这意味着控制器设计更为灵活,且对模型不确定性具有鲁棒性,能够有效地应对模型误差和外界干扰。
自适应控制策略是解决模型不确定性问题的有效手段。本课题中的PD自适应算法能够根据系统的实际运行情况动态调整控制器参数,以适应不确定性并消除由模型误差引起的轨迹误差。由于算法具备全局指数收敛特性,它能确保跟踪误差随着时间的推移迅速减小,直至达到任意小的水平。
为了验证所设计控制器的性能,研究者运用MATLAB软件进行了两关节直接驱动机器人的仿真实验。MATLAB作为一个强大的数学工具,提供了丰富的库函数和仿真环境,适用于复杂控制系统的设计与分析。通过仿真,研究证明了基于PD的多关节机器人控制方法在跟踪精度和对模型不确定性的鲁棒性方面的有效性。
关键词:PD控制,自适应控制,轨迹跟踪,仿真,多关节机器人,全局指数收敛,模型不确定性
总结来说,这项研究提出了一个高效、鲁棒的PD自适应控制器,适用于多关节机器人,尤其在面临模型不确定性时表现出色。通过MATLAB仿真实验,控制器的性能得到了验证,为实际应用提供了理论依据。这一研究成果对于提升机器人轨迹跟踪的精度以及增强系统的抗干扰能力具有重要意义,有助于推动机器人控制技术的发展。

数相结合的形式,利用 ODE45 的方法求解连续对象方程,主程序由 Simulink 模块实
现,控制器由 M 函数实现。输入指令信号为一采样周期 1ms 的正弦信号。采用 PID
方法设计控制器,其中 k
P
=1.2,k
I
=1.8,k
D
=0.08。误差的初始化时通过时钟功能实现
的,从而在 M 函数中实现了误差的积分和微分。
控制主程序:chap2_3.mdl,如图 2-6 所示。
图 2-6 PID 正弦跟踪
控制器子程序:见附录得 chap2_3.mdl
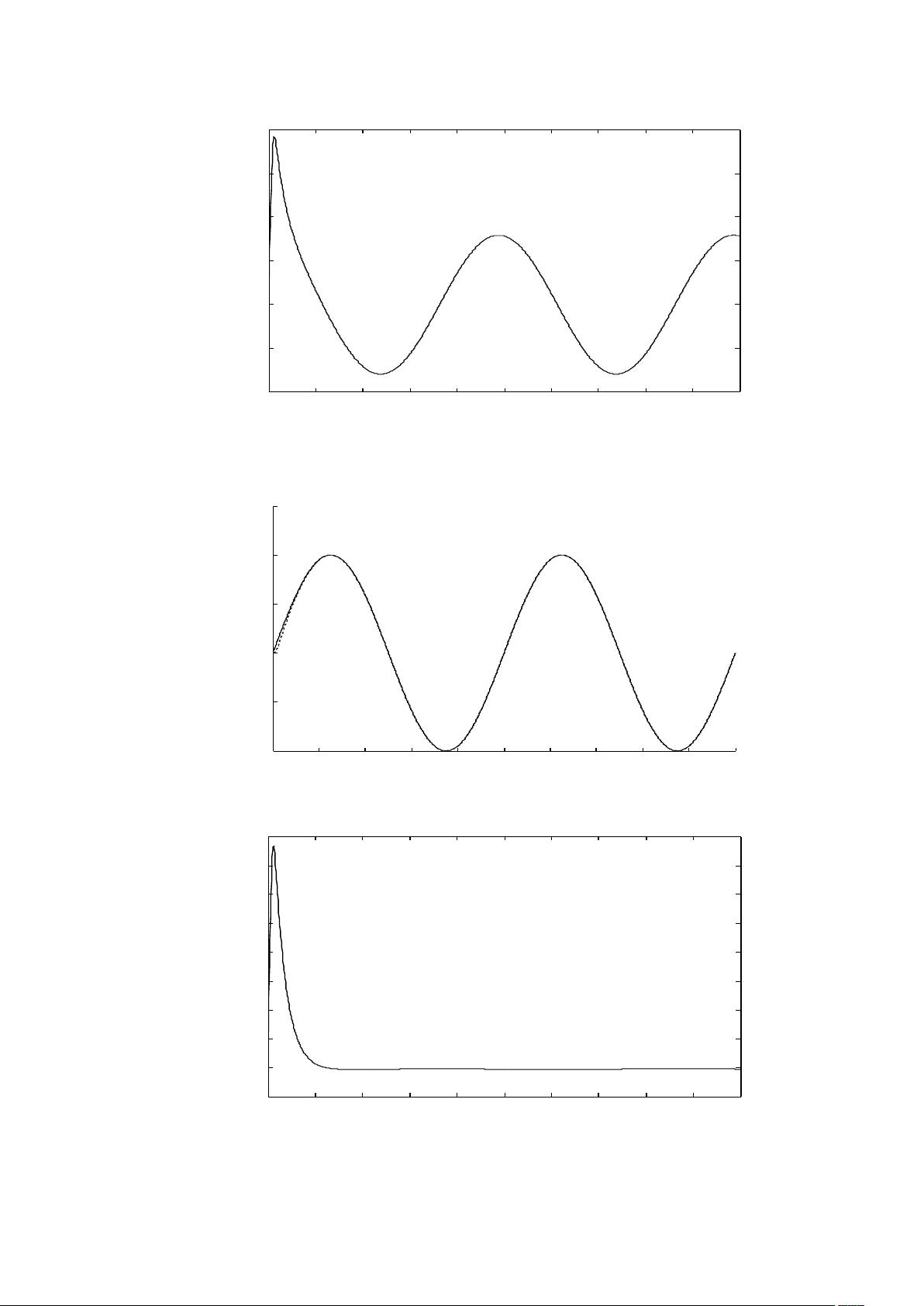
PID 正弦跟踪结果如图 2-7 所示。
图 2-7 PID 正弦跟踪
2.3.2 基于前馈补偿的 PID 控制算法及仿真
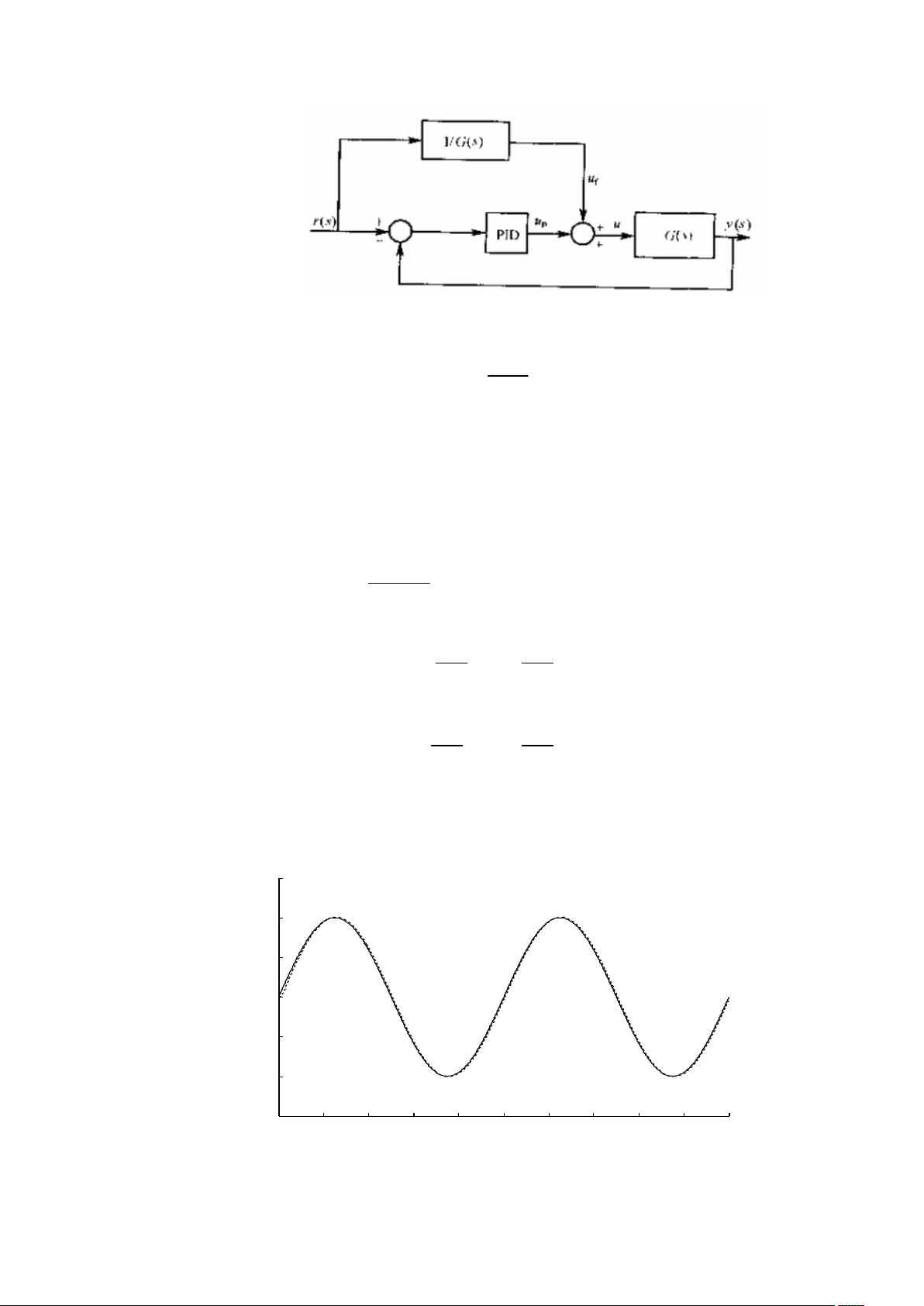
在高精度伺服控制中,前馈控制可用来提高系统的跟踪性能。经典控制理论中的
前馈控制设计是基于复合控制思想,当闭环系统为连续系统时,使前馈环节与闭环系
统的传递函数之积为 1,从而实现输出完全复现输入。作者利用前馈控制的思想,针
对 PID 控制设计了前馈补偿,以提高系统的跟踪性能,其结构如图 2-8 所示。
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
剩余64页未读,继续阅读
2022-07-12 上传
2023-07-11 上传
2021-10-10 上传
2021-09-21 上传
109 浏览量
2023-07-12 上传
2022-07-03 上传

老帽爬新坡
- 粉丝: 98
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 两个环信聊天demo.7z
- Pytorch_tutorial
- 二进制时钟:以二进制表示显示时钟时间-matlab开发
- poketcg:神奇宝贝TCG的拆卸
- ShipMMGmodel.zip
- typora-setup-x64.rar
- Hackernews-Node
- U12_Windows_Driver.zip
- 职业危害防治管理规章制度汇编
- 语境
- 安卓QQ聊天界面源代码
- Gardeningly - Latest News Update-crx插件
- calculator:使用 javascript 构建基本计算器
- JavaCalculatorApplication
- bnf:解析BNF语法定义
- COSC-350
