基于Matlab的水箱液位模糊控制系统设计与仿真
需积分: 47 159 浏览量
更新于2024-09-07
19
收藏 187KB DOC 举报
"该文介绍了基于MATLAB Simulink的水箱液位模糊控制系统设计,通过模糊控制策略来实现水位的精确控制。文中详细阐述了模糊控制系统的结构,包括模糊控制器、控制对象、检测装置等组成部分,并对比了模糊控制器与传统模拟或数字控制器的区别。此外,文章还探讨了模糊控制器的维数选择,指出二维模糊控制器在实际应用中的优势,但考虑到计算复杂性,本例中采用了一维模糊控制系统,即单输入单输出系统。最后,文章提到了利用MATLAB进行水箱水位系统仿真的步骤,包括建立模糊推理系统和使用Simulink进行设计与仿真。"
模糊控制系统是一种利用模糊逻辑理论进行控制的系统,与传统的模拟或数字控制系统相比,模糊控制器用模糊逻辑替代了常规的控制器。模糊控制器可以是连续型或离散型,通常在工程实践中采用数字计算机实现,因此具备灵活性和可扩展性。模糊控制器的核心在于其输入输出的模糊化处理,允许不精确的、基于语言规则的控制决策。
在水箱液位控制的场景中,一维模糊控制器被用来调整阀门开度以保持水位稳定。这种控制器的输入是水位误差,输出是阀门控制量。然而,为了获得更精细的控制效果,通常会选择二维模糊控制器,考虑误差和误差变化率两个输入变量,以及控制量的变化作为输出。尽管二维控制器能够提供更好的动态性能,但其复杂性增加了计算负担。
在MATLAB环境中,利用模糊逻辑工具箱可以创建水箱水位的模糊推理系统(FIS),接着使用Simulink工具箱对系统进行建模和仿真。这个过程包括定义模糊规则、模糊化输入、推理过程和反模糊化输出等步骤,最终通过仿真验证模糊控制策略的有效性。
MATLAB的Simulink是一个强大的可视化仿真平台,可以方便地搭建、分析和优化各种控制系统模型。在水箱液位控制系统的设计中,通过Simulink可以直观地展示系统结构,设置输入和输出参数,进行实时仿真,从而评估和优化控制性能。
本文通过水箱液位控制系统的实例,深入浅出地解释了模糊控制理论在MATLAB Simulink中的应用,为理解和实践模糊控制提供了基础。通过仿真,可以有效地验证和改进控制策略,以实现更精确、更稳定的水位控制。
水箱水位模糊控制系统仿真建模
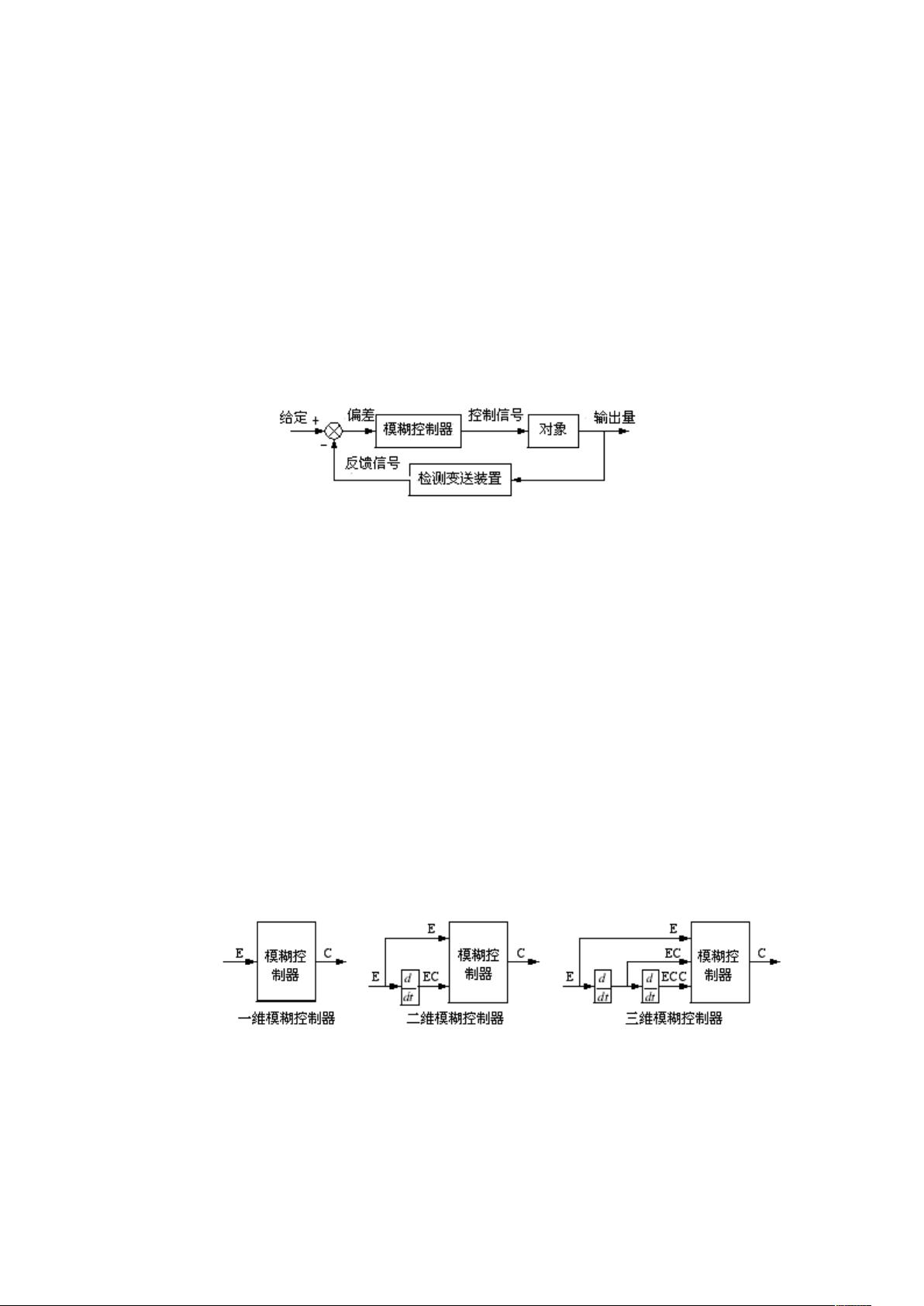
一、模糊控制系统的结构
图 1-1 模糊控制系统结构
Fig. 1-1 structure of fuzzy control system
从图中可以看出,模糊控制系统由给定输入、模糊控制器、控制对象、检
测变送装置、反馈信号与给定输入的相加环节等组成。这种系统结构和一般的
模拟或数字控制系统并没有太大的区别。模糊控制系统只是用模糊控制器取代
模拟或数字控制系统中的控制器。模拟控制器是一种连续型的控制器,数字控
制器是一种离散型的控制器。从理论上讲,模糊控制器应是连续型的控制器,
但在工程上实现模糊控制主要采用数字计算机,故在实际应用时模糊控制器又
是一种离散型控制器。
很明显,模糊控制器是模糊控制系统和其它控制系统区别最大的环节。模
糊控制器由于是采用数字计算机实现的,因此它具有下列重要的功能:
图 1-2 模糊控制器的基本结构
Fig. 1-2 basic structure of fuzzy controller
图中列出了几种维数(即输入量个数)不同的单输入单输出(SISO)模糊
控制器。一般情况下,一维模糊控制器用于一阶被控对象。由于这种控制器输
下载后可阅读完整内容,剩余7页未读,立即下载
1284 浏览量
419 浏览量
1970 浏览量
123 浏览量
131 浏览量
2021-09-21 上传
2021-10-06 上传

那个梦
- 粉丝: 1
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 边缘检测\图像边缘检测技术综述
- oracle常用经典sql查询
- jBPM开发入门指南_V0.1.pdf
- 离散事件动态系统的结构
- sqlserver2000
- 离散事件动态系统仿真优化方法综述
- PADS Logic 教程
- sms 2003安全补丁管理文档
- Windows.PowerShell.in.Action.Feb.2007
- 日本安川MOTOMAN工业机器人HP6使用说明书.pdf
- Active Directory Schema Modification And Publishing For SMS 2003
- webwork_by_moxie.pdf
- pads2007layout教程
- webwork2 快速入门
- solaris操作系统基础知识
- proteus 教程
