嵌入式四轴运动控制器:ARM+S3C2440+DSP方案
138 浏览量
更新于2024-09-02
收藏 214KB PDF 举报
"基于ARM+DSP的嵌入式四轴运动控制器设计,通过结合ARM微处理器S3C2440和专用DSP运动控制芯片PCL65045BL,构建了一种高性能、低成本、体积小且可独立运行的四轴运动控制器,适用于精密制造的多轴数控系统。"
在当前的工业控制领域,运动控制系统的性能至关重要。传统的基于PC和低端微控制器的系统由于高成本、高能耗和低可靠性,逐渐无法适应现代制造的严格要求。随着嵌入式技术的进步,特别是ARM架构微处理器的发展,这种趋势得到了显著改变。ARM处理器以其小巧的尺寸、低廉的价格和低功耗特性,在运动控制领域展现出巨大的潜力。
本文提出的嵌入式四轴运动控制器,核心是采用S3C2440 ARM微处理器,这是一款功能强大、性能稳定的处理器,适合处理复杂的运算任务。同时,结合了PCL6045BL DSP运动控制芯片,该芯片具备出色的数字信号处理能力,能实现高精度的多轴伺服控制,满足高速、高精度的运动控制需求。
硬件设计上,该控制器采用了主从式双CPU架构,即ARM作为主机处理人机交互和通信接口任务,而DSP则专注于实时的运动控制。这种分离式的架构有助于提高系统的整体效率和响应速度。
软件方面,通过在S3C2440上移植μC/OS-II实时操作系统,确保了系统的实时性和稳定性。μC/OS-II是一款轻量级、高效的实时操作系统,特别适合嵌入式环境,能够有效地管理多任务并行执行。
该嵌入式四轴运动控制器不仅具备高度的通用性,可以广泛应用于雕刻机、机器人、绣花机以及数控加工等多个工业控制场景,而且其低成本和可移植性使得它成为解决精密制造领域对高效多轴控制系统的理想解决方案。通过这种方式,工业设备可以实现更加精确、灵活和节能的运动控制,从而提升生产效率和产品质量。
总结来说,基于ARM+DSP的嵌入式四轴运动控制器设计,是应对现代工业控制挑战的一种创新方法,通过结合高性能处理器和专用控制芯片,实现了高性能、低能耗的运动控制,为工业自动化带来了新的可能性。
基于基于ARM+DSP的嵌入式四轴运动控制器设计的嵌入式四轴运动控制器设计
动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC
及低端微控制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。为解决精密制造
对低成本、可移植性强的通用型多轴数控系统的迫切需求,给出一种基于ARM微处理器S3C2440和专用DSP运
动控制芯片PCL65045BL组合的嵌入式四轴运动控制器。
导读:动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC及低端
微控制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。随着嵌入式技术的日益成熟,嵌人式
运动控制器已经初露锋芒。
运动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC及低端微控
制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。随着嵌入式技术的日益成熟,嵌人式运动
控制器已经初露锋芒。基于ARM技术的微处理器具有体积小、低成本、低功耗的特点,决定其在运动控制领域具有良好的发
展前景。
PCL6045BL是一种新型专用DSP运动控制芯片,它具有强大的数据处理能力和较高的运行速度,可以实现高精度的多轴伺服
控制。为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,文中给出一种基于ARM 微处理器S3C2440
与DSP专业运动控制芯片PCL6045BL构成的嵌入式四轴运动控制器。该运动控制器具有高性能、低成本、体积小、可独立运
行等特点,可以满足运动控制系统高速、高精度的 要求。它可广泛应用于雕刻机、机器人、绣花机以及数控加工等工业控制
领域。
为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,给出一种基于ARM微处理器S3C2440和专用DSP
运动控制芯片PCL65045BL组合的嵌入式四轴运动控制器。硬件上该控制器采用ARM+DSP的主从式双CPU结构,结合ARM
在人机界面显示、通信接口方面的优势以及PCL6045BL高控制精度的优点。软件上在S3C2440上移植μC/OS-II实时操作系统
来管理运动控制系统。该控制系统通用性较强,可广泛应用于雕刻机、机器人、绣花机以及数 控加工等工业控制领域。
1 系统总体设计
嵌入式四轴运动控制器主要由硬件部分和软件部分构成。
硬件主要包括S3C2440嵌入式主控板和PCL6045BL运动控制板两个部分。S3C2440嵌入式主控板和PCL6045BL运动控制板
之间通过通用的IDE通信接口进行连接。
软件方面在硬件平台的基础上移植S3C2440实时嵌入式操作系统,设计Boot Loader、外设驱动以及运动控制系统的应用程
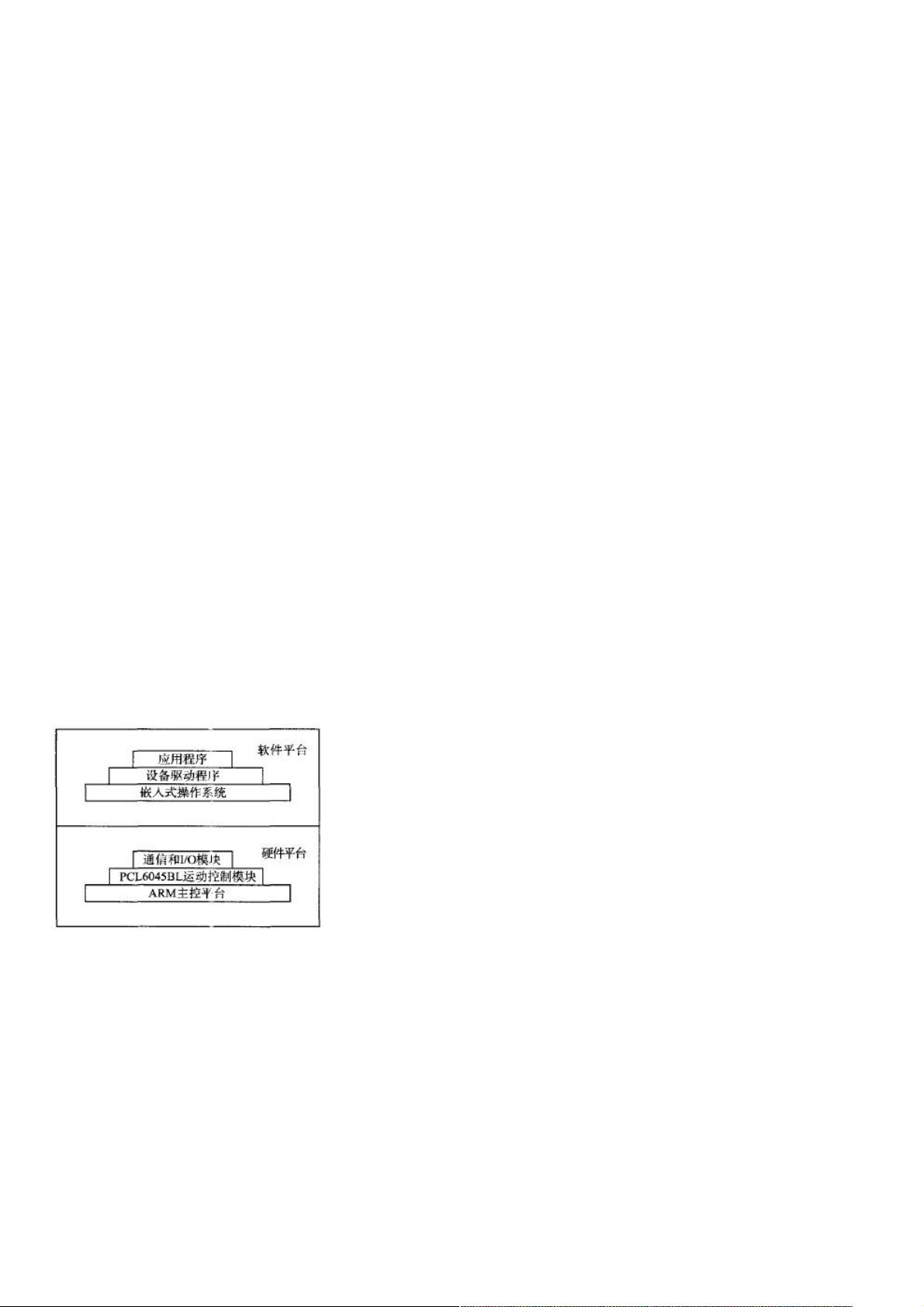
序。采用上述的软硬件平台,嵌入式运动控制器可以达到开放性能好、精度高的要求。本嵌入式四轴运动控制器的结构如图1
所示。
图1 嵌入式四轴运动控制器的构成
图1 嵌入式四轴运动控制器的构成
ARM具有丰富的片内外围电路,如USB接口、IIS接口、LCD控制器等,在人机界面的显示、通信接口以及系统移植方面具有
更强大的功能。PCL6045BL运动控制芯片速度快,可靠性高,性能好,在运动控制方面有很大的优势。
实时操作系统μC/OS-II包含了实时内核、任务管理、时间管理、任务间通信同步和内存管理等功能,可以使各个任务独立工
作,互不干涉,很容易实现准时而且无误地执行,使实时应用程序的设计和扩展变得容易,使应用程序的设计过程大为减化
。将S3C2440处理器、PCL6045BL 以及μC/OS-II三者的优势应用到本嵌入式四轴运动控制器中可以使其具有强大的功能,并
缩短开发时间。
本嵌入式四轴运动控制器以S3C2440为主控平台,在ARM上移植μC/OS-II实时操作系统来进行人机界面的显示、I/O的管理、
任务问的通信、指令的编译等工作。PCL6045BL运动控制模块主要负责位置控制,插补驱动,速度控制。用户的指令通过
S3C2440指令编译系统的编译,通过与PCL6045BL之问的专用通信接口来控制DSP运动控制芯片发出脉冲以达到使伺服电机
高速运行。
2 系统硬件设计
下载后可阅读完整内容,剩余3页未读,立即下载
2022-07-08 上传
2012-01-19 上传
点击了解资源详情
2021-01-19 上传
2020-10-19 上传
2012-10-10 上传
点击了解资源详情
点击了解资源详情

weixin_38677306
- 粉丝: 4
- 资源: 916
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
