CANopen协议详解:应用层与节点状态机
需积分: 10 65 浏览量
更新于2024-07-19
1
收藏 1.68MB DOCX 举报
"CANopen协议是建立在CAN(Controller Area Network)总线基础之上的高层通信协议,旨在提供一种标准化的方式来管理和协调CAN网络上的不同设备通信。CANopen协议不依赖特定的应用,它提供了高配置灵活性、高效数据传输和低实现复杂度。其核心特点是基于CAN标准报文格式,无需扩展报文支持,网络中最多可容纳127个节点,且该协议是开源的。"
CANopen协议详解:
1. CAN总线:CAN(Controller Area Network)是一种多主总线的串行通信协议,广泛应用于汽车、工业自动化等领域。CAN报文由11位标识符(ID)区分,用于定义消息的优先级和功能。CANopen在其基础上增加了应用层,以提供更高级别的通信服务。
2. CANopen应用层协议:CANopen应用层构建于数据链路层之上,它细化了CAN报文的标识符定义,将11位ID中的高4位作为功能码,低7位作为节点号,统称为通讯对象标识符(COB-ID)。这使得报文分为7个优先级,包括网络命令(NMT)、同步(SYNC)、紧急(EMERGENCY)、时间戳(TIME)、过程数据对象(PDO)、服务数据对象(SDO)和节点状态报文(NMTErrControl)。
3. 功能码详解:
- NMT:网络管理报文,由主站发送,用于改变从站的工作状态。
- SYNC:同步报文,由主站周期性发送,用于同步PDO的发送。
- EMERGENCY:紧急报文,从站在发生紧急情况时发送,所有节点都能接收并处理。
- TIME:时间报文,由主站发送,同步从站的内部时钟。
- PDO:过程数据对象,分为发送PDO和接收PDO,每个节点有4对,用于传输过程数据。
- SDO:服务数据对象,用于读写对象字典,分发送和接收。
- NMTErrControl:节点错误控制报文,从站发送,监测自身运行状态。
4. 状态机:每个CANopen节点都有一个状态机,控制节点的通信方式和行为。初始状态为预设定,自动设置参数和对象字典,只发送节点启动报文。预运行状态中,节点等待主站命令并接收配置请求,可接收除PDO外的所有报文。运行状态是正常工作状态,接收和发送所有通讯报文。停止状态是临时状态,限制节点通信。
CANopen协议通过定义标准的通信流程和节点行为,简化了CAN网络的集成和设备间的通信,确保了网络的稳定性和可靠性。
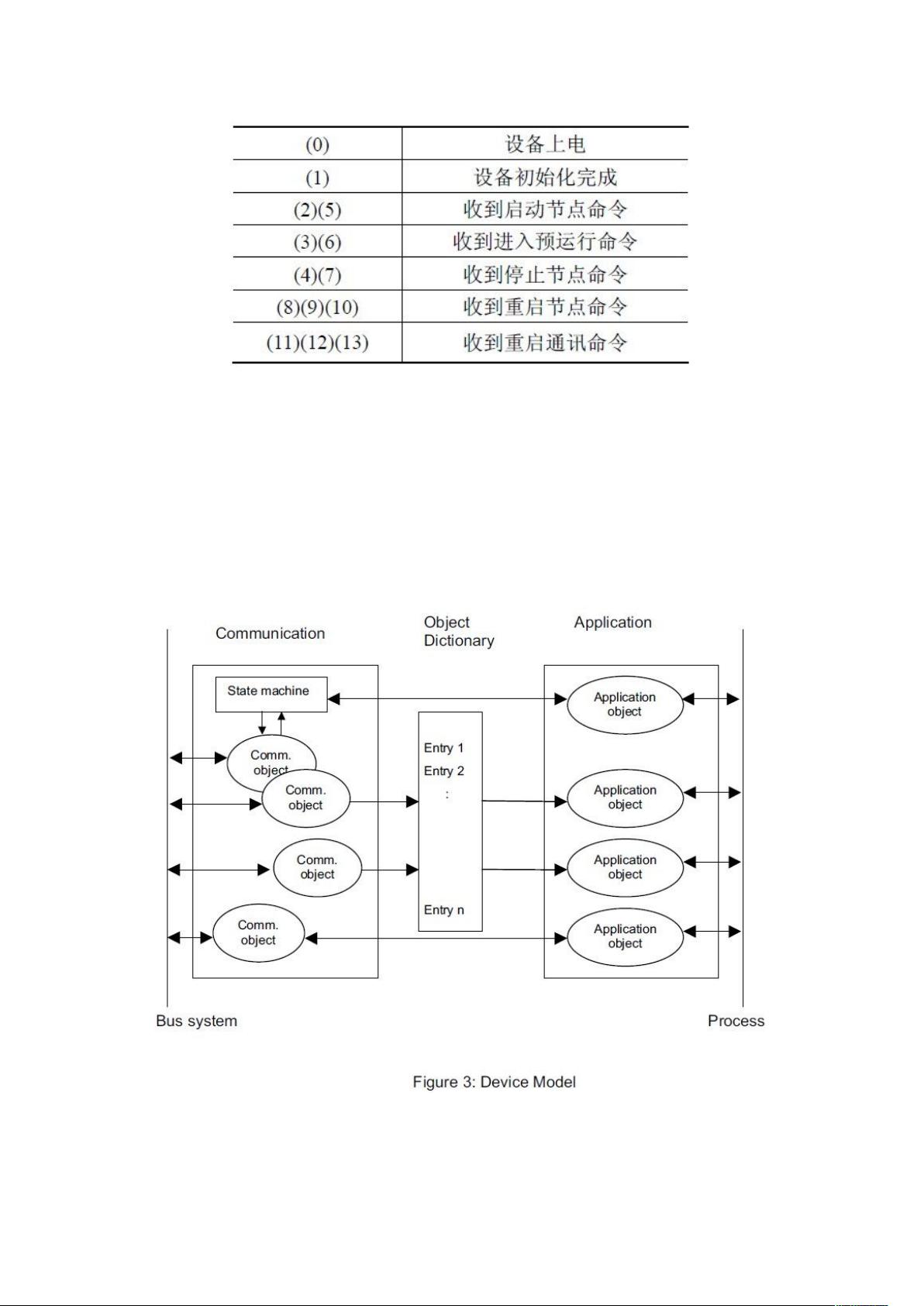
CANopen 节点状态转换条件
3、Device Model
Communicaon 提供通信对象和传输经过底层的数据的适当功能;
Object Diconary 对此设备上的应用程序对象,通信对象和状态机的行为有影响的所有数据
剩余28页未读,继续阅读
2019-05-08 上传
2019-06-01 上传
2021-04-06 上传
2021-10-03 上传
2022-07-14 上传
2013-01-17 上传

qq_16518495
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
