四元数与旋转:NXPSensorFusionLibrary应用注解
需积分: 0 158 浏览量
更新于2024-06-30
收藏 299KB PDF 举报
"AN5022 四元数1"
这篇应用笔记(AN5022)主要探讨了四元数代数及其在表示旋转中的应用,特别关注了NXP Sensor Fusion Library中用于处理四元数的函数,这些函数在`orientation.c`文件中可以找到。NXP Semiconductors是这份文档的发布者,强调所有提供的信息都受法律免责声明约束。
四元数是一种数学概念,用于扩展复数,尤其适用于三维空间中的旋转表示。它们由四个实数组成(w, x, y, z),通常表示为q = w + xi + yj + zk,其中i, j, k是满足特定乘法规则的虚单位。相比于传统的欧几里得坐标系统,四元数在计算旋转时具有更高效的运算优势,例如避免了万向节死锁问题。
应用笔记首先介绍了四元数的基本概念,包括它们的定义、加法、乘法以及逆运算。接着,它讨论了四元数与旋转矩阵之间的关系,如何使用四元数来描述和执行刚体的三维旋转。这部分内容可能涵盖了四元数到旋转矩阵的转换和反之的转换,以及如何通过四元数进行旋转操作。
文档还详细阐述了NXP Sensor Fusion Library中的一些关键四元数函数,可能包括初始化、四元数乘法、四元数积分、归一化以及将四元数转换为角度轴表示等。Sensor Fusion Library通常用于融合来自陀螺仪、加速度计等传感器的数据,以实现更准确的姿态估计。
此外,修订历史部分表明,这份文档在2016年6月21日更新到了版本2.0,相较于1.0版,主要进行了小的改动和格式调整,以符合NXP Semiconductors的新品牌形象。尽管没有详细列出具体修改内容,但可以推测这些改动可能涉及到文档布局、法律条款的更新以及可能的功能增强或澄清。
这篇应用笔记是理解和使用四元数在嵌入式系统特别是传感器融合领域中进行旋转计算的重要参考资料,对于开发涉及3D旋转处理的MATLAB程序的工程师来说非常有价值。
NXP Semiconductors
AN5022
Quaternion Algebra and Rotations
AN5022
All information provided in this document is subject to legal disclaimers.
© NXP B.V. 2016. All rights reserved.
Application note
Rev. 2.0 — 21 June 2016
5 of 26
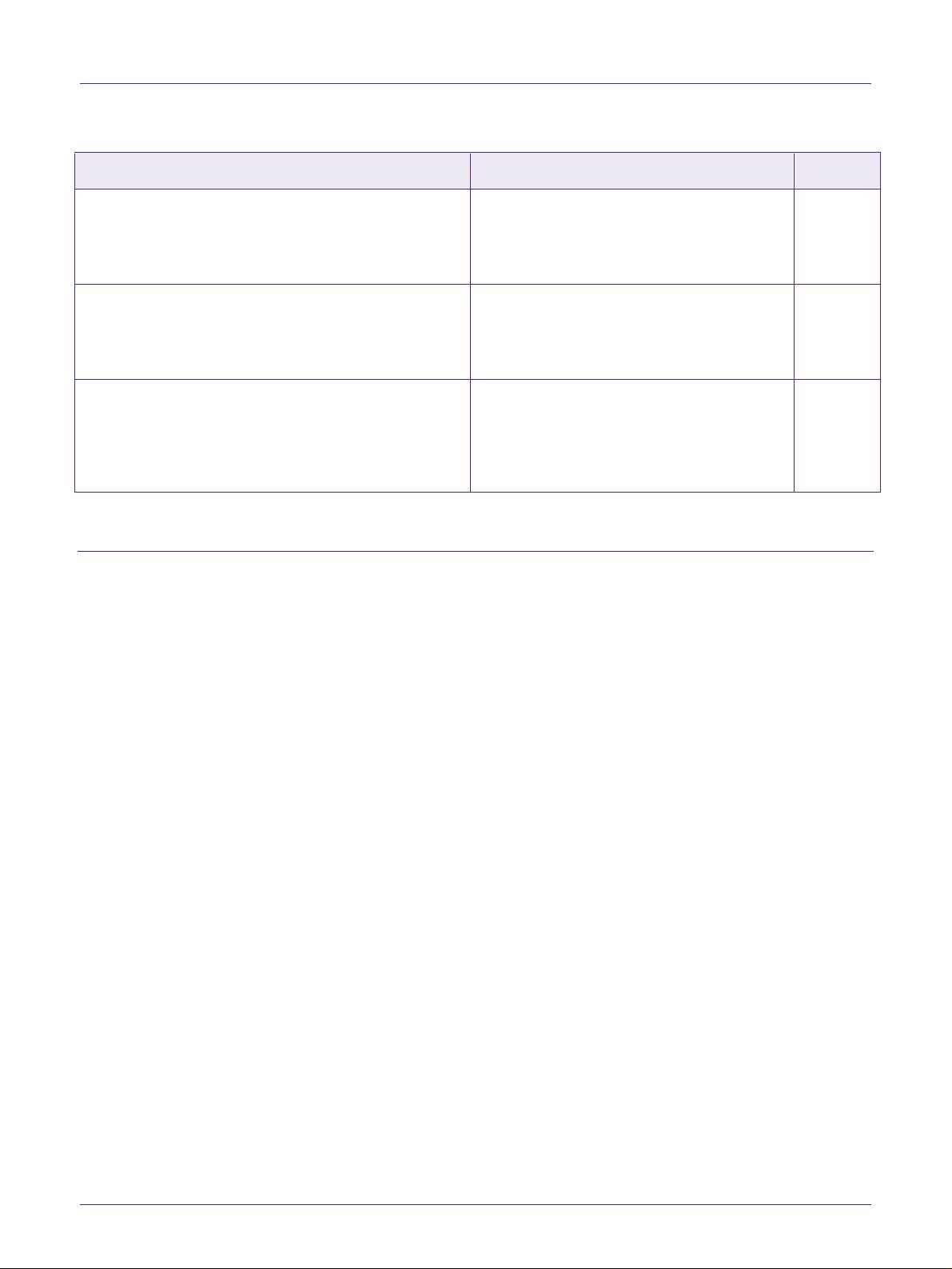
Functions
Description
Reference
Section
void fRotationVectorDegFromQuaternion
(struct fquaternion *pq, float
rvecdeg[]);
Computes the rotation vector from a rotation
quaternion.
5.1
void fQuaternionFromRotationVectorDeg
(struct fquaternion *pq, const float
rvecdeg[], float fscaling);
Computes the rotation quaternion from a
rotation vector with scaling.
5.2
void fLPFOrientationQuaternion
(struct fquaternion *pq, struct
fquaternion *pLPq, float flpf, float
fdeltat, float fOmega[])
Function low-pass filters the orientations
represented by a sequence of quaternions.
6.3
2. Quaternion Algebra
2.1 Introduction
Quaternions form a class of four-component hyper-complex numbers.
Whereas the complex number has two components, one real and the other imaginary:
= +
(1)
the quaternion has four components:
=
+
+
+
=
{
,
,
,
}
(2)
where
,
,
and
are real numbers. The values , and are simply tags
identifying the three vector components of the quaternion.
is termed the scalar component and =
+
+
is termed the vector
component of the quaternion.
Equivalent representations of the quaternion in terms of its scalar and vector
components are:
=
+ =
{
,
}
=
,
=
,
(3)
If the scalar component
is zero, the quaternion is termed a pure quaternion or vector.
If the vector component is zero, then the quaternion is a real number. The quaternion
=
{
1, 0, 0, 0
}
with scalar component equal to one and vector component equal to zero is
termed the identity quaternion.

剩余25页未读,继续阅读
1012 浏览量
339 浏览量
166 浏览量
2022-08-04 上传
160 浏览量
352 浏览量
2008-05-12 上传
2024-11-01 上传
2021-02-08 上传

乖巧是我姓名
- 粉丝: 35
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
