利用Kinect打造的3D物体类别数据集
需积分: 10 10 浏览量
更新于2024-09-12
收藏 1.75MB PDF 举报
"a category-level 3-D object dataset:putting the kinect to work"
这篇论文介绍了一个基于Kinect传感器的大型3D物体类别级别数据集,旨在解决当前3D物体检测数据集在场景、类别、实例和视角多样性上的不足。微软的Kinect深度传感器的普及引发了对具有挑战性的3D物体检测数据集的需求,而现有的数据集无法满足这一需求。
作者Allison Janoch等人来自加州大学伯克利分校和马克斯普朗克信息研究所,他们在论文中强调了Kinect设备在获取高质量3D数据方面的潜力,并创建了一个包含真实家庭和办公环境中的彩色和深度图像对的数据集。该数据集目前涵盖超过50个类别,并通过众包方式持续增加图像数量,增加了数据的多样性和广泛性。
在介绍部分,作者指出最近3D感知技术的复兴,特别是低成本但高精度的深度传感器如Kinect的广泛应用,这为3D对象识别和理解提供了新的可能性。然而,现有的3D数据集在场景、物体类别、实例和观察角度的多样性上存在局限,限制了这些技术的发展。因此,他们构建的这个数据集旨在填补这一空白。
为了评估数据集的有效性,作者设立了基于PASCAL VOC风格的物体检测任务的基线性能。同时,他们还探讨了如何利用估计的物体世界尺寸来提升检测效果,这是利用3D信息的一个重要方面。论文中提出的这两种方法可能对提高3D物体检测的准确性具有积极影响。
此外,该数据集和相关的注释可以在http://www.kinectdata.com上公开获取,为研究者和开发者提供了一个宝贵的资源,以推动3D物体检测和理解领域的进步。通过这个数据集,研究者可以训练和测试他们的算法,探索更复杂的3D视觉任务,如语义分割、6D姿态估计和3D重建等。
这个数据集的发布不仅促进了3D计算机视觉技术的研究,也推动了Kinect传感器在实际应用中的潜力挖掘,为未来智能家居、自动驾驶、机器人导航等领域提供了强有力的数据支持。
A Category-Level 3-D Object Dataset: Putting the Kinect to Work
Allison Janoch, Sergey Karayev, Yangqing Jia, Jonathan T. Barron, Mario Fritz, Kate Saenko, Trevor Darrell
UC Berkeley and Max-Plank-Institute for Informatics
{allie, sergeyk, jiayq, barron, saenko, trevor}@eecs.berkeley.edu, mfritz@mpi-inf.mpg.de
Abstract
Recent proliferation of a cheap but quality depth sen-
sor, the Microsoft Kinect, has brought the need for a chal-
lenging category-level 3D object detection dataset to the
fore. We review current 3D datasets and find them lack-
ing in variation of scenes, categories, instances, and view-
points. Here we present our dataset of color and depth
image pairs, gathered in real domestic and office environ-
ments. It currently includes over 50 classes, with more
images added continuously by a crowd-sourced collection
effort. We establish baseline performance in a PASCAL
VOC-style detection task, and suggest two ways that in-
ferred world size of the object may be used to improve de-
tection. The dataset and annotations can be downloaded at
http://www.kinectdata.com.
1. Introduction
Recently, there has been a resurgence of interest in avail-
able 3-D sensing techniques due to advances in active depth
sensing, including techniques based on LIDAR, time-of-
flight (Canesta), and projected texture stereo (PR2). The
Primesense sensor used on the Microsoft Kinect gaming
interface offers a particularly attractive set of capabilities,
and is quite likely the most common depth sensor available
worldwide due to its rapid market acceptance (8 million
Kinects were sold in just the first two months).
While there is a large literature on instance recogni-
tion using 3-D scans in the computer vision and robotics
literatures, there are surprisingly few existing datasets for
category-level 3-D recognition, or for recognition in clut-
tered indoor scenes, despite the obvious importance of this
application to both communities. As reviewed below, pub-
lished 3-D datasets have been limited to instance tasks, or
to a very small numbers of categories. We have collected
and describe here the initial bulk of the Berkeley 3-D Ob-
ject dataset (B3DO), an ongoing collection effort using the
Kinect sensor in domestic environments. The dataset al-
ready has an order of magnitude more variation than previ-
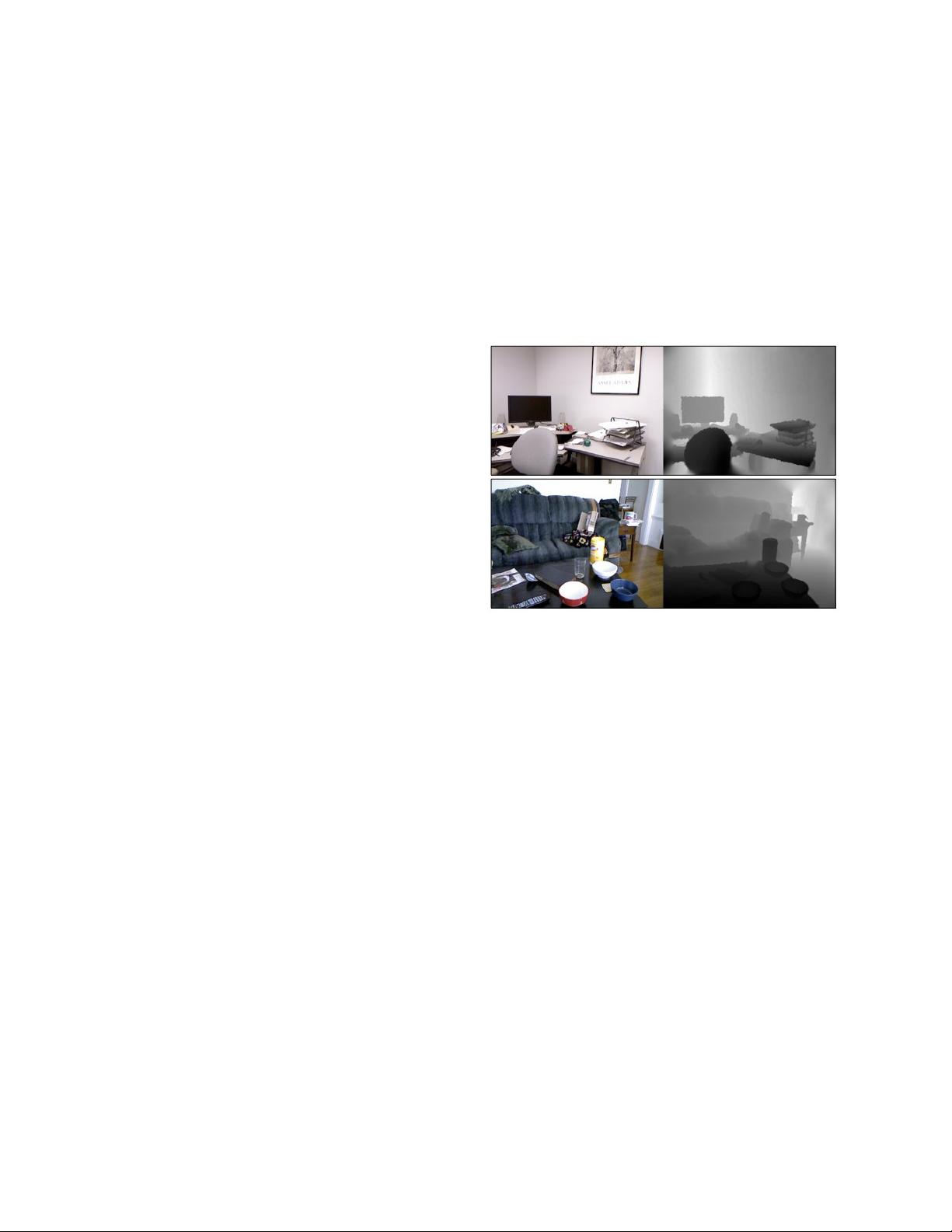
Figure 1. Two scenes typical of our dataset.
ously published datasets. The latest version of the dataset is
available at http://www.kinectdata.com
As with existing 2-D challenge datasets, our dataset has
considerable variation in pose and object size. An impor-
tant observation our dataset enables is that the actual world
size distribution of objects has less variance than the image-
projected, apparent size distribution. We report the statistics
of these and other quantities for categories in our dataset.
A key question is what value does depth data offer for
category level recognition? It is conventional wisdom that
ideal 3-D observations provide strong shape cues for recog-
nition, but in practice even the cleanest 3-D scans may re-
veal less about an object than available 2-D intensity data.
Numerous schemes for defining 3-D features analogous to
popular 2-D features for category-level recognition have
been proposed and can perform in uncluttered domains. We
evaluate the application of HOG descriptors on 3D data and
evaluate the benefit of such a scheme on our dataset. We
also use our observation about world size distribution to
place a size prior on detections, and find that it improves
detections as evaluated by average precision, and provides
a potential benefit for detection efficiency.
下载后可阅读完整内容,剩余6页未读,立即下载
853 浏览量
789 浏览量
520 浏览量
117 浏览量
240 浏览量
294 浏览量
433 浏览量
197 浏览量
144 浏览量

petalcs
- 粉丝: 2
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







