改进离散蜜蜂算法优化混合流水线工期
90 浏览量
更新于2024-08-29
收藏 902KB PDF 举报
本文探讨了一种针对混合流水车间问题(Hybrid Flow Shop Problem, HFS)的优化方法,该问题在制造系统中具有广泛的应用,被公认为典型的NP-hard组合优化问题。混合流水车间是指工作流程中包含了多种类型的设备和工件转移路径,使得任务调度复杂化。
研究者们提出了一个改进的离散人工蜂群算法(Improved Discrete Artificial Bee Colony, IDABC),该算法旨在通过有效地解决HFS问题来最小化生产周期(Makespan),即完成所有任务所需的时间。算法的核心思想是结合新颖的差分进化(Differential Evolution)与改良的变量邻域搜索(Modified Variable Neighborhood Search, MVNS),这两种技术的融合旨在增强搜索的全局性和局部探索能力。
在IDABC中,工蜂( Employed Bees)和侦察蜂(Scout Bees)分别负责寻找新的可能解和探索未知区域。工蜂通过差分进化生成新解,同时利用MVNS进行局部优化,以保持解的质量。侦察蜂则在遇到无法改进的解时,会进行破坏与重建(Destruction and Construction),这是一种创新的淘汰机制,有助于跳出局部最优,寻求全局最优解。
为了评估算法的有效性,研究者还进行了正交试验设计,这有助于量化不同参数设置对算法性能的影响,确保了结果的可靠性和算法的稳健性。经过一系列的接收、修订和接受过程,最终于2014年6月25日在网上发表。
这篇研究论文提出了一种创新的混合流水车间问题求解策略,通过结合差分进化和变量邻域搜索,提高了离散人工蜂群算法在解决实际生产环境中的复杂调度问题时的性能,为制造业提供了实用的工具,有望降低生产成本并提高生产效率。
C
π
1
ðiÞ;1
¼ min
k ¼ 1;2;…m
1
fIM
k;1
gþp
π
1
ðiÞ;1
NM
1
¼ arg min
k ¼ 1;2;…m
1
fIM
k;1
g
IM
NM
1
;1
¼ C
π
1
ðiÞ;1
8
>
>
>
<
>
>
>
:
i ¼ m
1
þ1; m
1
þ2; …n ð3Þ
π
j
ðiÞ¼gðC
π
j 1
ðiÞ;j 1
Þ i ¼ 1; 2; …n; j ¼ 2; 3; …s ð4Þ
C
π
j
ðiÞ;j
¼ C
π
j
ðiÞ;j 1
þp
π
j
ðiÞ;j
IM
i;j
¼ C
π
j
ðiÞ;j
(
i ¼ 1; 2; …m
1
; j ¼ 2; 3; …s ð5Þ
C
π
j
ðiÞ;j
¼ max fC
π
j
ðiÞ;j 1
; min
k ¼ 1;2;…m
j
fIM
k;j
ggþp
π
j
ðiÞ;j
NM
j
¼ arg min
k ¼ 1;2;…m
j
fIM
k;j
g
IM
NM
j
;j
¼ C
π
j
ðiÞ;j
8
>
>
>
>
<
>
>
>
>
:
i ¼ m
j
þ1; m
j
þ2; …n; j ¼ 2; 3; …s
ð6Þ
where π
j
is the job permutation at the stage j; π
k
(i) is the ith job in
the job permutation π
k
; C
π
k
ðiÞ;j
is the completion time of job π
k
(i)at
the stage j; IM
i,j
represents the idle moment of machine i at the
stage j; NM
j
denotes the serial number of earliest available
machine at the moment at the stage j; the function S
j
(i)¼g(S
j 1
(i))
(i¼1,2,…, n) means that S
j
is the permutation of i (i¼1,2,…n) at the
stage j based on the ascending order of S
j 1
(i)(i¼1,2,…n) at the
stage j 1; and argmin
k
fIM
k
g stands for the argument of the
minimum, i.e. the set of points of the given argument for which
the given function attains its minimum value.
Eq. (1) defines the objective function which to minimize the
makespan C
max
. In above recursive equations (2)–(6), the authors
firstly calculate the completion time of jobs at the stage one, then
that of the stage two, until the last stage. To illustrate the model
and the issues described above, the authors consider a simple
example of the HFS problem with 4 jobs and 3 stages. The number
of machines at each stage is 2 and the processing time p
i,j
is given
by
p
i;j
¼
241
542
215
223
2
6
6
6
4
3
7
7
7
5
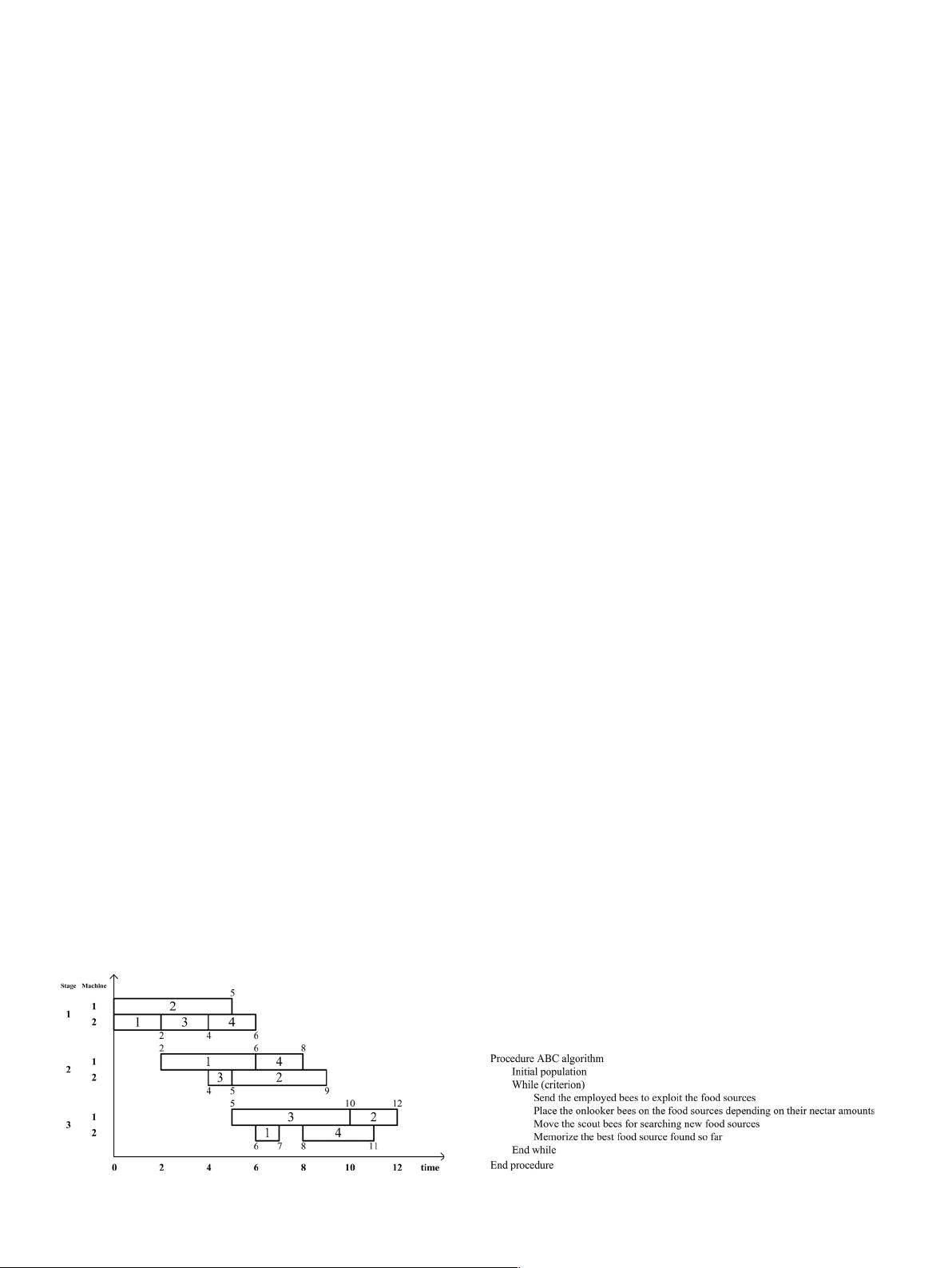
Suppose the job sequence at the stage one π
1
¼(2, 1, 3, 4) is
given. Then the makespan C
max
is calculated as follows (the Gantt
chart is shown in Fig. 1):
Stage 1
C
π
1
ð1Þ;1
¼ IM
1;1
¼ p
π
1
ð1Þ;1
¼ 5
C
π
1
ð2Þ;1
¼ IM
2;1
¼ p
π
1
ð2Þ;1
¼ 2
C
π
1
ð3Þ;1
¼ min fIM
1;1
; IM
2;1
gþp
π
1
ð3Þ;1
¼ 2 þ2 ¼ 4
NM
1
¼ arg min fIM
1;1
; IM
2;1
g¼2
IM
2;1
¼ C
π
1
ð3Þ;1
¼ 4
C
π
1
ð4Þ;1
¼ min fIM
1;1
; IM
2;1
gþp
π
1
ð4Þ;1
¼ 4 þ2 ¼ 6
8
>
>
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
>
>
:
π
2
¼ð1; 3; 2; 4Þ
Stage 2
C
π
2
ð1Þ;2
¼ IM
1;2
¼ C
π
2
ð1Þ;1
þp
π
2
ð1Þ;2
¼ 2þ4 ¼ 6
C
π
2
ð2Þ;2
¼ IM
2;2
¼ C
π
2
ð2Þ;1
þp
π
2
ð2Þ;2
¼ 4þ1 ¼ 5
C
π
2
ð3Þ;2
¼ max fC
π
2
ð3Þ;1
; min fIM
1;2
; IM
2;2
ggþp
π
2
ð3Þ;2
¼ 5þ4 ¼ 9
NM
2
¼ arg min fIM
1;2
; IM
2;2
g¼2
IM
2;2
¼ C
π
2
ð3Þ;2
¼ 9
C
π
2
ð4Þ;2
¼ max fC
π
2
ð4Þ;1
; min fIM
1;2
; IM
2;2
ggþp
π
2
ð4Þ;2
¼ 6þ2 ¼ 8
:
8
>
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
>
:
π
3
¼ð3; 1; 4; 2Þ
Stage3
C
π
3
ð1Þ;3
¼ IM
1;3
¼ C
π
3
ð1Þ;2
þp
π
3
ð1Þ;3
¼ 5þ5 ¼ 10
C
π
3
ð2Þ;3
¼ IM
2;3
¼ C
π
3
ð2Þ;2
þp
π
3
ð2Þ;3
¼ 6þ1 ¼ 7
C
π
3
ð3Þ;3
¼ max fC
π
3
ð3Þ;2
; min fIM
1;3
; IM
2;3
ggþp
π
3
ð3Þ;3
¼ 8þ3 ¼ 11
NM
3
¼ arg min fIM
1;3
; IM
2;3
g¼2
IM
2;3
¼ C
π
3
ð3Þ;3
¼ 11
C
π
3
ð4Þ;3
¼ max fC
π
3
ð4Þ;2
; min fIM
1;3
; IM
2;3
ggþp
π
3
ð4Þ;3
¼ 10þ2 ¼ 12
:
8
>
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
>
:
Thus the makespan is:
C
max
ðπ
1
Þ¼ max fC
π
3
ð1Þ;3
; C
π
3
ð2Þ;3
; C
π
3
ð3Þ;3
; C
π
3
ð4Þ;3
g¼C
π
3
ð4Þ;3
¼ 12
3. The improved discrete artificial bee colony (IDABC)
algorithm for the HFS problem
The ABC algorithm inspired by the foraging behaviors of real
honey bees is originally designed for the continuous nature of
optimization problems. In a real bee colony, there are some tasks
done by specialized individuals. Bees try to maximize the nectar
amount unloaded to the food stores in the hive by the division of
labor and self-organization, which are essential components of
swarm intelligence [41]. The colony of artificial bees in the ABC
algorithm contains three groups of bees, namely, the employed
bees, the onlooker bees, and the scout bees. Each of them plays
different roles in the process: the employed bees fly onto the
sources which they are exploiting; the onlooker bees waiting in
the hive are responsible for deciding whether a food source is
promising by watching the dances performed by the employed
bees; and the scout bees choose sources randomly by means of
some internal motivations or possible external clues. Both the
onlooker bees and the scout bees are also called unemployed bees.
A food source in the search place corresponds to a solution of the
optimization problem, and the nectar amount of the food source
corresponds to the fitness of the solution. The processes of the ABC
algorithm can be shown in pseudo-code as Fig. 2.
Following the above procedure for the continuous function
optimization, in this article the authors propose an improved
discrete version of the ABC algorithm for the HFS problem. It is
shown in details below.
3.1. Individual representation and initialization
Owing to its continuous nature of the basic ABC algorithm,
researchers always converted the real domain into the discrete
domain when it is applied to the discrete optimization. And this
overhead makes the algorithms complicated. The model of the HFS
problem is formulated by using the vector representation in the
previous section. As a result, the authors adopt this representation
Fig. 1. An example of HFS problem with 4 jobs and 3 stages. Fig. 2. The procedure of basic ABC algorithm.
Z. Cui, X. Gu / Neurocomputing 148 (2015) 248–259250
剩余11页未读,继续阅读
426 浏览量
107 浏览量
141 浏览量
101 浏览量
2021-02-24 上传
132 浏览量
483 浏览量

weixin_38625164
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Node.js OpenStack客户端使用教程
- 压缩文件归档管理与组织方法详解
- MakeCode项目开发与管理:从扩展到部署
- 如何通过USB芯片检测甄别真假U盘
- cc2541 ccdebug烧录工具及SmartRF驱动程序安装指南
- 掌握VC++设计:深入解析俄罗斯方块游戏开发
- 掌握Solidity: 在以太坊测试网络上部署ERC20兼容合约
- YOLO-V3算法在PyTorch中的实现与性能提升
- 自动格式化各国货币类型,个性化货币设置工具
- CSS3按钮:20种炫酷样式与滑过特效
- STM32系列单片机ADC+DMA实验教程与实践
- 简易象棋游戏Java编程教程
- 打造简易ASP网站服务器的实践指南
- Gatsby入门:使用hello-world启动器快速启动React项目
- POJOGenerator v1.3.3:绿色免费POJO代码生成器发布
- 软件开发方法与工具实践:CSCI3308项目解析
