NACHI那智机器人EtherNet/IP操作与设定指南
需积分: 9 134 浏览量
更新于2024-07-14
收藏 2.82MB PDF 举报
"NACHI那智_EthernetIP.pdf" 是一份关于NACHI那智公司机器人操作手册,重点介绍了其FD控制装置支持的EtherNet/IP功能。这份文档旨在确保用户在使用具有EtherNet/IP功能的NACHI机器人时,能够安全、高效地进行操作和维护。
EtherNet/IP是一种工业以太网协议,它基于开放系统互连(OSI)模型,被广泛应用于自动化领域,特别是在Rockwell Automation的ControlLogix和Allen Bradley PLCs系统中。在NACHI的机器人系统中,EtherNet/IP允许设备通过标准以太网接口进行高速、实时的数据通信,实现控制器与现场设备之间的无缝集成。
本手册首先概述了EtherNet/IP的基本概念,强调在使用机器人前需详细阅读说明书并遵守所有安全规定。只有经过NACHI机器人培训的人员才能进行安装、操作和维修工作,同时必须遵守各国的机器人安全法规。手册还提供了联系服务中心的信息,以便用户解决疑问和获取售后服务。
接着,手册详细介绍了控制装置的 EtherNet/IP 功能,包括输入输出信号的构成,性能参数,硬件结构和设定方法,以及EtherNet/IP网络的工作原理。这些内容帮助用户理解如何配置和使用 EtherNet/IP 进行数据交换。
在所需组件部分,手册列出了成功运行 EtherNet/IP 功能所需要的硬件和软件组件,确保用户可以准备齐全必要的资源。
在信号分配章节,手册详细阐述了如何分配输入输出信号,尤其是在软件PLC有效和无效的情况下,以及跨通路分配的规则。此外,还特别讨论了EtherNet/IP特定的信号分配策略。
使用方法部分提供了详细的设定步骤,包括从动节点和主节点的设置,扫描列表的设定,以及如何根据需要更改网络环境。这些步骤指导用户正确配置机器人以适应不同的网络需求。
故障检测和错误处理是手册的重要部分,涵盖了EtherNet/IP网络和控制装置可能出现的错误类型,以及如何进行详细设定来预防和解决Fieldbus错误。
这份文档是NACHI那智机器人用户在实施EtherNet/IP通信时的必备参考资料,它提供了全面的技术细节和操作指南,确保用户能够充分利用EtherNet/IP的强大功能,实现高效、可靠的工业自动化流程。
2.1 所需组件
2-1
第2章 所需组件
2.1 所需组件
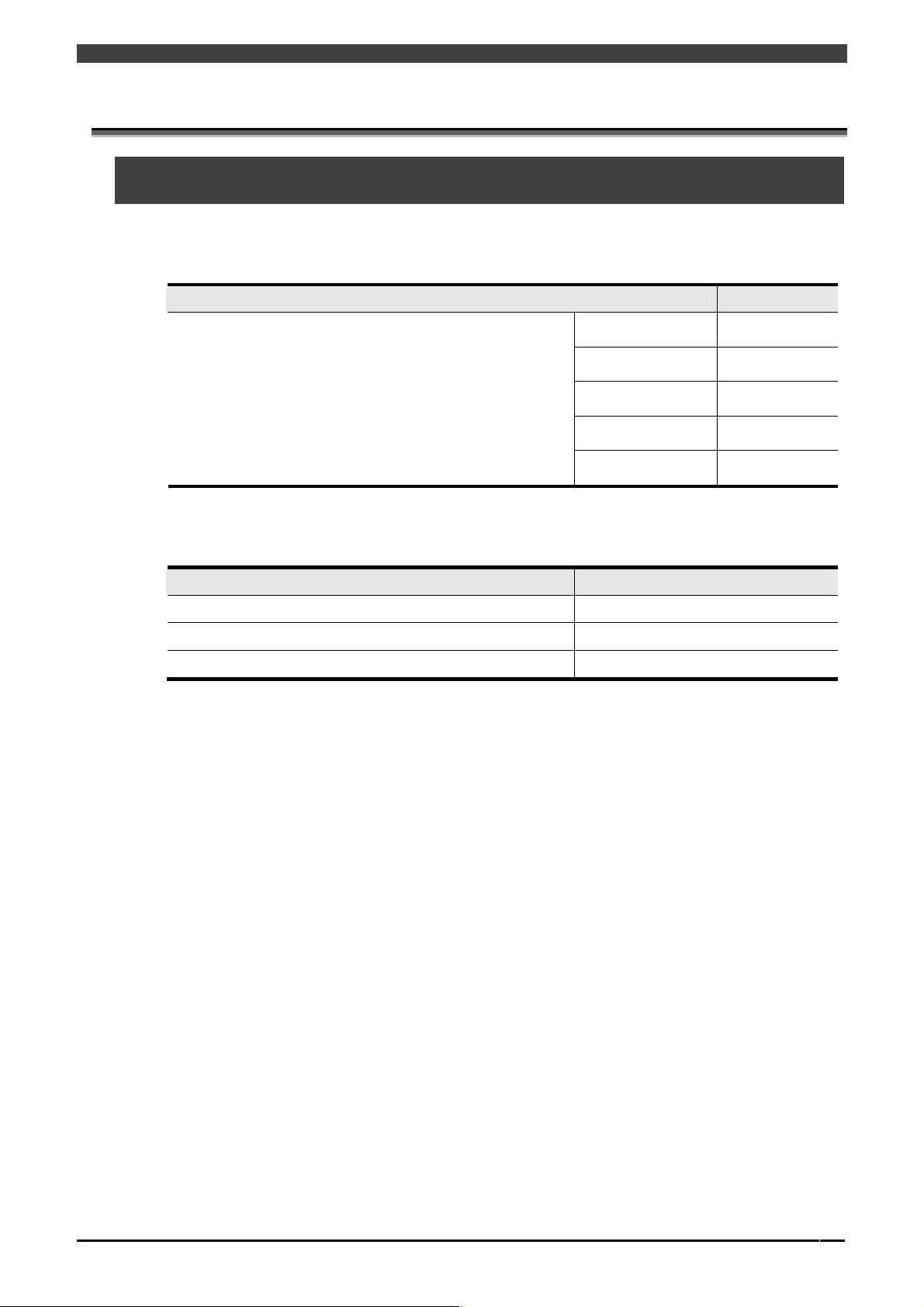
使用 EtherNet/IP 功能时,需要选配产品。
表
2.1.1 EtherNet/IP 所需的选配产品
部件名称 产品编号
扫描器1个规格 AX10-OP130-A
适配器1个规格 AX10-OP130-B
扫描器+适配器 AX10-OP130-C
适配器2个规格 AX10-OP130-D
信息组信息转移通路基板+HMS 公司生产的 EtherNet/IP 模块
扫描器2个规格 AX10-OP130-E
仅需要信息组信息转移通路基板或 HMS 公司生产的 EtherNet/IP 模块时,产品编号如下表所示。
表
2.1.2 各部件的产品编号
部件名称 产品编号
信息组信息转移通路基板
UM236-10
HMS 公司生产的 EtherNet/IP 扫描器模块
AB5057-B
HMS 公司生产的 EtherNet/IP 适配器模块
AB4173-B
使用扫描器功能时,需要以下设定工具(客户自备)。
・RsNetworx for EtherNet/IP╱罗克韦尔公司制

剩余47页未读,继续阅读
2020-08-04 上传
2021-03-30 上传
2021-03-30 上传
2021-03-30 上传
2020-07-27 上传
2020-08-18 上传
2019-06-22 上传

艺多压身
- 粉丝: 2
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
