现代PDR室内定位系统:技术综述
"这篇文章是关于基于PDR(步行者死航推算)的室内定位系统的综合概述,主要探讨了PDR技术在室内跟踪中的应用,分析了不同领域的研究贡献,并对比了各种技术方法。文中还涉及了步态检测、惯性导航、基于步态和方向的死航推算,以及如何利用建筑地图和粒子滤波器进行定位校正。此外,还讨论了智能手机作为PDR传感器设备的可能性。"
基于PDR的室内定位技术是一种利用微型传感器和处理节点来追踪行人移动的方法,随着这些技术的不断发展,PDR系统在室内定位领域变得越来越实用。PDR系统通常结合惯性传感器(如加速度计和陀螺仪)和其他传感器(如磁力计),并运用特定领域的行走知识来跟踪用户运动。
步态检测是PDR系统的基础,它涉及到识别行走周期中的脚步。通过分析加速度计和陀螺仪的数据,可以识别出行走中的脚步起始和结束点,从而计算出步长。接下来,步态特征分析用于确定行人的步态参数,如步频和步幅,这对于精确定位至关重要。
惯性导航是PDR系统的核心,它利用连续的步骤信息和行走方向来估算位置。然而,由于传感器漂移,长时间的定位误差会逐渐累积,这就需要引入校正机制。其中,基于步态和方向的死航推算是常用方法,通过每一步的位移和转向角度来更新位置。
为了减少误差,论文还探讨了利用建筑地图和粒子滤波器的技术。粒子滤波是一种概率数据关联方法,能有效地处理不确定性,通过与建筑地图的匹配,可以校正由PDR系统累积的定位误差。同时,将绝对位置固定(如通过Wi-Fi指纹定位或蓝牙信标)集成到PDR系统中,形成混合定位系统,进一步提高精度。
此外,考虑到智能手机的广泛普及和内置的多种传感器,文章指出智能手机可以作为PDR的潜在传感设备。智能手机中的传感器组合(如加速度计、陀螺仪和磁力计)可以提供实时的运动数据,而其强大的处理器则能执行复杂的定位算法。
PDR技术在室内定位方面显示出了巨大潜力,它可以单独提供定位服务,或者与其他定位技术结合,以实现更准确的室内导航。随着技术的不断进步,PDR有望在零售、紧急响应、智能家居等众多领域发挥重要作用。
HARLE: A SURVEY OF INDOOR INERTIAL POSITIONING SYSTEMS FOR PEDESTRIANS 1283
Step Detection
Step Length
Heading
SHS
Particle Filter
Gyroscopes
INS
Accelerometers
Optical
Pressure
Electromyography (EMG)
Sensors
Position
GPS
Building Maps
Radio Fingerprints
RFID
Ultrasonic Ranging
RF Ranging
Statistical Model
Compass
(Magnetometer)
Barometer
SLAM
WiFi
12
13
14
15
16
18
21
1
2
3
3
4
17
7
6
5
25
8
23
24
10
11
22
19
26
1. [6]
2. [7]
3. [8]
4. [9]–[12]
5. [13]
6. [14]
7. [15]–[19]
8. [13], [16], [17], [19]–[21]
9. [16], [17], [21]
10. [16], [17], [21]
11. [22]–[25]
12. [12], [14]
13. [11], [13], [20], [26]
14. [15]–[18], [21], [27]–[31], [31]
15. [19], [21], [31], [32]
16. [9]–[12], [12], [15], [17], [19], [28], [29], [33]
17. [15], [15], [17], [19], [21], [26]–[29], [31]
18. [13], [19]
19. [32], [34]
20. [10]
21. [12], [19], [20]
22. [16]–[19]
23. [18]
24. [25], [29]
25. [30], [33]
26. [24]
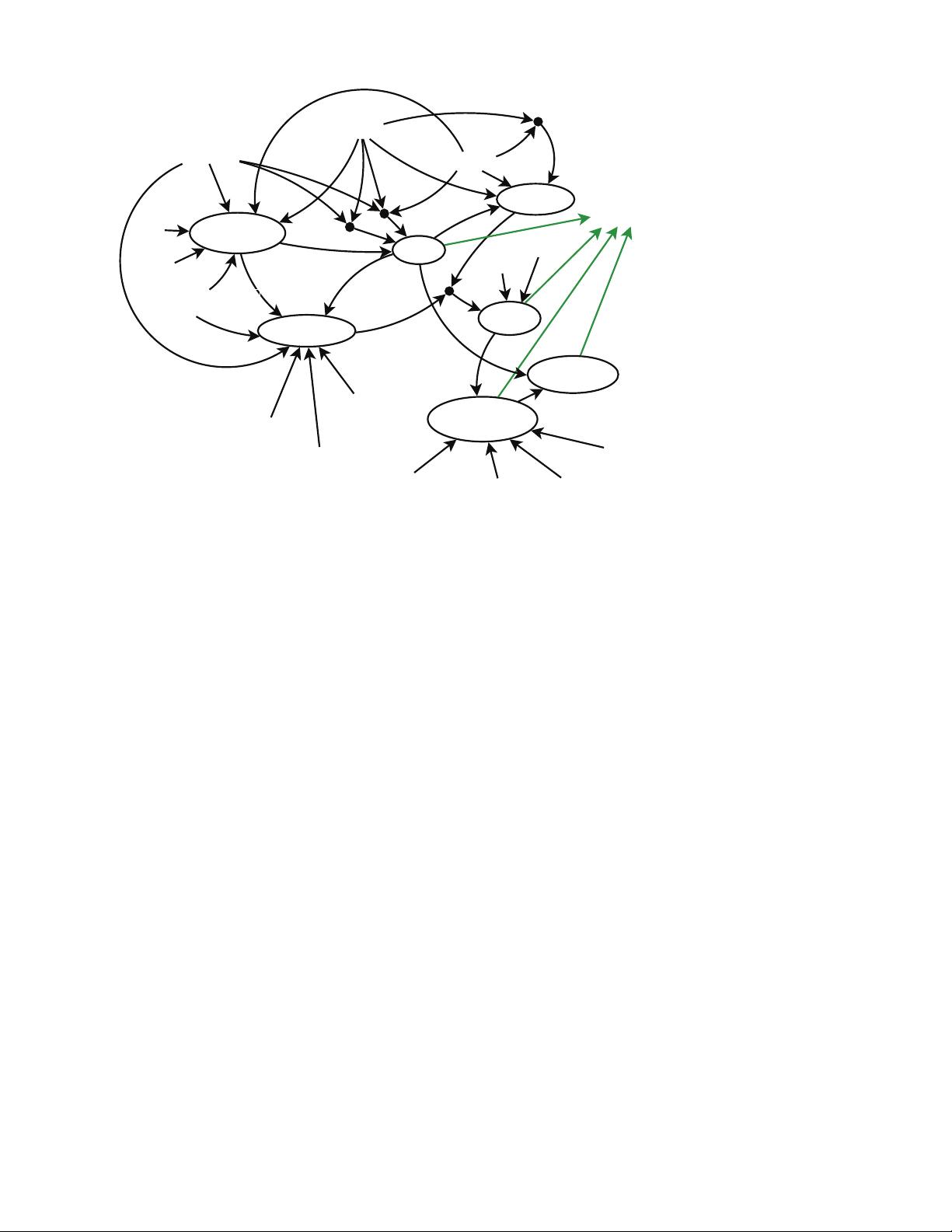
Fig. 2. PDR configurations. System inputs are connected via annotated arrows to ellipses, which represent algorithms and system subunits. Arrow annotations
gi ve a numerical key into the list of literature references on the right..
location systems that improve over time as they learn
about the environment.
Both of these techniques are addressed in more detail later
in this survey. Figure 2 provides a graphical summary of all the
sensors and techniques that are surveyed herein. Sensors are
connected to system subunits (shown in ellipses) by arrows
that represent the flow of data. For example, the arrows
starting at the Accelerometers label represent accelerometry
data that have been used to detect steps; to directly estimate
step lengths; and been combined with gyroscopes or with
gyroscopes and a compass to form an INS. For each flow
of data, the figure gives a set of re ferences to literature that
uses that specific sensor or technique.
B. Ambulation
Many of the systems described here succeed by assuming
ambulatory motion and deriving related invar iants. Ambulation
itself can be characterised by the alternate ‘vaulting’ of the
body over a stiffened leg, with the fall being broken by the
opposing leg. At any given moment at least one foot is in
contact with the ground—there is no flight phase as is found
when running. Instead the gait cycle is usually defined in terms
of the phases occurring at a specific foot: the primary phases
are stance and swing. In its stance phase the foot of interest
is firmly planted on the ground, providing a pivot point over
which to vault. In the swing phase, the foot lifts from behind
the pedestrian and swings through to break the fall and enter
its stance phase.
The transition from stance to swing involves the foot
‘peeling’ from the floor, providing a final push from the
toes. This event goes by many names, but toe-off and push-
off are the most common. The transition back to the stanc e
phase begins with the heel contacting the floor (the heel-strike
or foot-down event) before the foot flattens (the foot-flatten
event). The foot remains flattened until the transition to the
swing begins, and the cycle restarts. The strong periodicity
in the movement coupled with the tendency of humans to
sustain a consistent pace allows for a variety of constraints to
be applied.
III. D
ETECTION OF THE GAIT CYCLE
The first task of an SHS is the identification of steps or
strides within the data. In fact, this is even used in many
INSs, as discussed shortly. At a minimum, these algorithms
must permit for accurate step counting, although many systems
also require accurate step segmentation. We can thus identify
two main algorithm types:
• Stance detection—algorithm s that identify periods of data
throughout which a given foot is planted on the floor.
To do this, the sensor is mounted to the foot. Typically
these are appropriate for step counting but give poor
segmentation output;
• Step cycle detection—algorithms that detect cycles in the
sensor data caused by the repetitive motion of walking.
This may involve searching for repeating data patterns or
for repeating events (e.g. the heel-strike). These are well
suited to step segmentation.
Typical stance detection algorithms are threshold-based.
The principle is that the sensor will be static during the stance
phase and the inertial sensors should report a corresponding
lack of activity that thresholding can easily identify. Most
algorithms threshold on the accelerometer magnitude [11],
[17], [35], although angular velocity thresholds have also been
used [21], [32], [36] and combinations have been trialed [27].
Even magnetometer thresholding can give usable stance detec-
tion under some circumstances [19]. In some cases applying
剩余12页未读,继续阅读
2021-01-14 上传
2018-10-19 上传
2018-07-02 上传
2021-11-18 上传
2024-02-19 上传
点击了解资源详情
点击了解资源详情

zhoubobobo
- 粉丝: 3
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Couleuvre-GAN:库勒夫集团的GAN代码(C ++)
- now
- deepchain:IPFS内容链
- Excel模板初中学生成绩统计表(模板).zip
- 1_合同管理_合同管理系统_jsp
- 2020年12月份全国各省市区县编码集合
- 数据科学项目
- ringcentral-embeddable-extension:可嵌入Chrome扩展程序的RingCentral
- holbertonschool-higher_level_programming
- Excel模板付款申请单-模版.zip
- JavaScript-Canvas-to-Blob:JavaScript Canvas to Blob是将画布元素转换为Blob对象的功能
- Xftp_v5 免费版
- Leetcode
- vector:用于创建交互式图形JavaScript
- DataStructure:该文件包括基本数据结构
- Excel模板付款申请单打印版模板.zip
