深度学习驱动的盲高光谱图像融合方法
需积分: 10 10 浏览量
更新于2024-08-12
收藏 1.39MB PDF 举报
本文主要探讨了"深盲高光谱图像融合"这一主题,针对传统的高光谱图像融合(Hyperspectral Image Fusion, HIF)方法存在的局限性进行创新研究。在传统的HIF过程中,假设高光谱相机的点扩散函数(Point Spread Function, PSF)与传统相机的光谱响应函数之间的线性映射是已知的,然而,在实际应用中,这种假设往往不切实际,因为不同设备的光学特性可能会有所差异。
本文提出了一种基于深度学习的盲高光谱图像融合方法。该方法突破了对观察模型(即PSF和光谱响应函数之间关系的依赖),通过深度学习的迭代和交替优化策略来估计和融合低分辨率的高光谱图像与高分辨率的多光谱图像。这种方法的优势在于其能够在无先验知识的情况下,自适应地学习和处理复杂的图像融合过程,提高了图像重建的精度和鲁棒性。
具体来说,该框架设计了一个深度学习网络架构,可能包括卷积神经网络(Convolutional Neural Networks, CNN)或者更先进的网络结构,用于捕捉图像的特征并推断出最佳的融合策略。网络在每次迭代中,一方面估计原始图像的高光谱成分,另一方面优化融合过程,确保融合后的图像既保持高空间分辨率又具有丰富的光谱信息。此外,为了保证结果的质量,该框架还可能包含正则化项,强制输出图像在物理上合理且满足一定的统计特性。
由于涉及到深度学习算法的运用,研究者可能采用了大量的训练数据集,通过监督或无监督学习的方式训练模型,以最小化重构误差或最大化图像的信息熵等目标函数。实验部分展示了该方法在各种场景下的性能对比,以及与现有非盲方法的优越性,证明了其在实际应用中的可行性和有效性。
总结来说,这篇研究论文在高光谱图像融合领域引入了深度学习技术,解决了传统方法中的问题,为高光谱图像的高效、自适应融合提供了一种新的解决方案。这种方法不仅提高了图像融合的精度,也为其他领域,如遥感科学、环境监测和智能城市感知等,提供了强大的工具支持。
Deep Blind Hyperspectral Image Fusion
Wu Wang
1
, Weihong Zeng
1
, Yue Huang
1
, Xinghao Ding
1∗
, John Paisley
2
1
Fujian Key Laboratory of Sensing and Computing for Smart City,
School of Information Science and Engineering, Xiamen University, China
2
Department of Electrical Engineering, Columbia University, New York, NY, USA
wangwu@stu.xmu.edu.cn, zengwh@stu.xmu.edu.cn
huangyue05@gmail.com, dxh@xmu.edu.cn, jpaisley@columbia.edu
Abstract
Hyperspectral image fusion (HIF) reconstructs high spa-
tial resolution hyperspectral images from low spatial res-
olution hyperspectral images and high spatial resolution
multispectral images. Previous works usually assume that
the linear mapping between the point spread functions of
the hyperspectral camera and the spectral response func-
tions of the conventional camera is known. This is unre-
alistic in many scenarios. We propose a method for blind
HIF problem based on deep learning, where the estimation
of the observation model and fusion process are optimized
iteratively and alternatingly during the super-resolution re-
construction. In addition, the proposed framework enforces
simultaneous spatial and spectral accuracy. Using three
public datasets, the experimental results demonstrate that
the proposed algorithm outperforms existing blind and non-
blind methods.
1. Introduction
Hyperspectral image (HSI) analysis has a wide range of
applications for object classification and recognition [13, 9,
33, 17], segmentation [22], tracking [23, 24] and environ-
mental monitoring [18] in both computer vision and remote
sensing. While HSI facilitates these tasks through informa-
tion across a large number of spectra, these many additional
dimensions of information means that the potential spatial
resolution of HSI systems is severely limited compared with
RGB cameras. HIF addresses this challenge by using the
jointly measured high resolution multispectral image (HR-
MSI)—often simply RGB—to improve the low resolution
HSI (LR-HSI) by approximating its high resolution version
(HR-HSI).
Generally, most state-of-the art methods formulate the
∗
Corresponding author
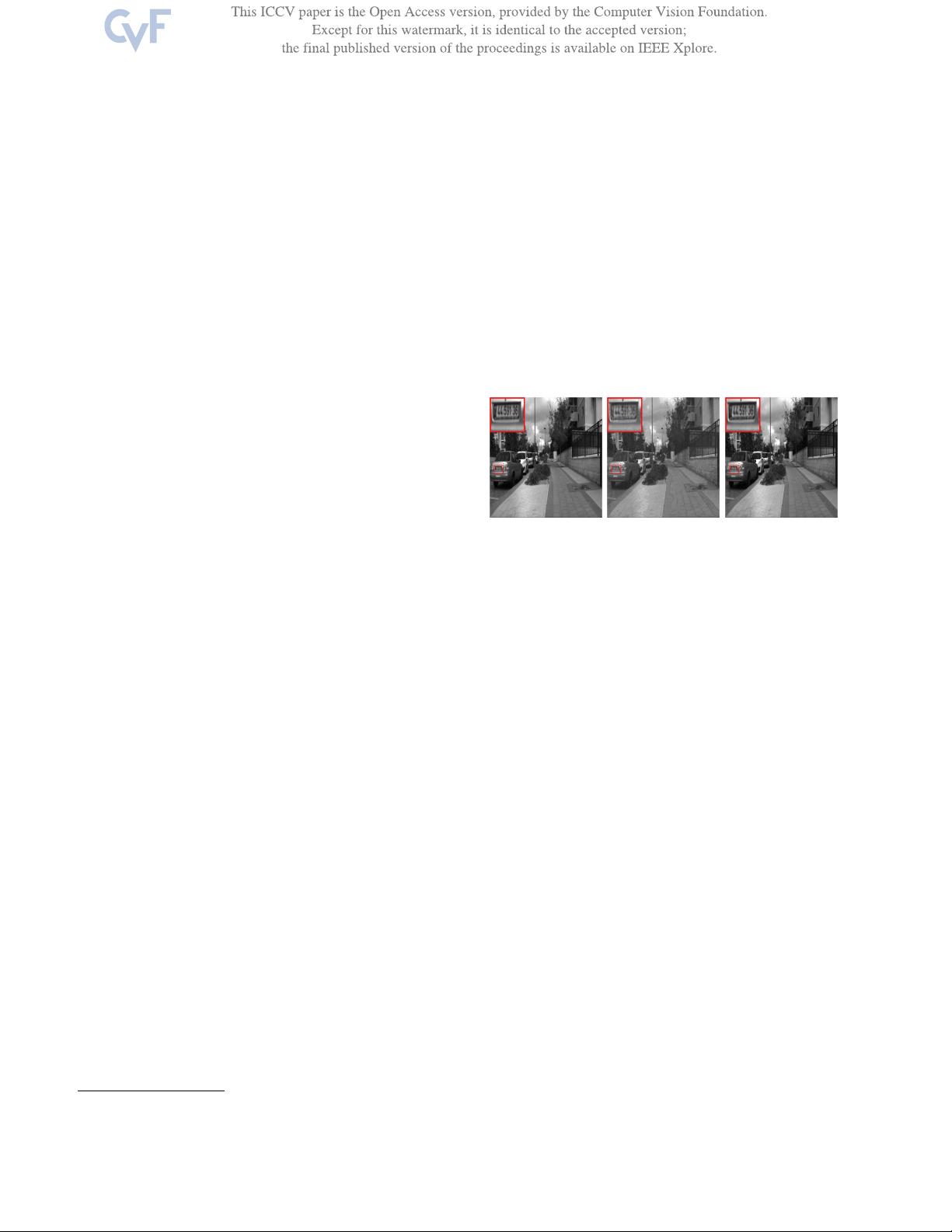
(a) gt (b) HySure (c) Ours
Figure 1: The 31st band of a reconstructed high resolu-
tion hyperspectral image (HR-HSI) with unknown spectral
response function. (a) ground-truth HR-HSI, (b) result of
HySure [20], (c) our result.
observation model through the linear functions [28, 7, 20]
Y = XBS,
(1)
Z = RX,
(2)
where X is the HR-HSI, Y is the LR-HSI and Z is the HR-
MSI. The linear operators B and S perform the appropriate
transformations to map X to the measured values; B repre-
sents a convolution between the point spread function of the
sensor and the HR-HSI bands, S is a downsampling opera-
tion, and R is the spectral response function of the multi-
spectral imaging sensor. The spectral response functions
and point spread functions are often assumed to be at least
partly known. A common way to learn X is through opti-
mizing an objective function of the form
min
X
kY − XBSk
2
F
+ λ
1
kZ − RXk
2
F
+ λ
2
ϕ(X), (3)
where the first and second terms enforce agreement with
the data and the third term is a regularization [12, 15, 6, 7].
However, this assumed relationship between X,Y,Z is not
always true, and because the information available about the
sensor is incomplete, it is unknowable [26]. In other words,
this non-blind fusion is often only an approximation, and
1
4150
下载后可阅读完整内容,剩余9页未读,立即下载
点击了解资源详情
217 浏览量
点击了解资源详情
156 浏览量
156 浏览量
142 浏览量
596 浏览量
527 浏览量
141 浏览量

weixin_38683488
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 自动生成CAD模型文件的测试流程
- 掌握JavaScript中的while循环语句
- 宜科高分辨率编码器产品手册解析
- 探索3CDaemon:FTP与TFTP的高效传输解决方案
- 高效文件对比系统:快速定位文件差异
- JavaScript密码生成器的设计与实现
- 比特彗星1.45稳定版发布:低资源占用的BT下载工具
- OpenGL光源与材质实现教程
- Tablesorter 2.0:增强表格用户体验的分页与内容筛选插件
- 设计开发者的色值图谱指南
- UYA-Grupo_8研讨会:在DCU上的培训
- 新唐NUC100芯片下载程序源代码发布
- 厂家惠新版QQ空间访客提取器v1.5发布:轻松获取访客数据
- 《Windows核心编程(第五版)》配套源码解析
- RAIDReconstructor:阵列重组与数据恢复专家
- Amargos项目网站构建与开发指南
