鱼眼相机的二次曲面投影模型
46 浏览量
更新于2024-08-31
收藏 2.35MB PDF 举报
"本文提出了鱼眼相机的曲面投影模型,用于分析现有模型中的畸变原因。通过构建理想的曲面投影模型并与现有模型进行对比,根据鱼眼图像点与其理想三维(3D)点的坐标关系获取理想曲面上的特征点。然后利用最小二乘法求得二次曲面,从而提出一种二次曲面投影模型。实验结果表明,该校正模型能有效改善鱼眼图像的畸变问题。"
这篇论文深入探讨了鱼眼相机的投影模型,这是在计算机视觉、图像处理和摄影测量等领域中的一个重要课题。鱼眼镜头因其广角视野而被广泛应用,但其固有的强烈畸变现象使得图像处理变得复杂。传统的校正方法往往不能完全消除这种畸变。
作者首先分析了当前存在的鱼眼图像矫正模型的畸变问题,指出这些模型在处理图像时可能出现的不足。他们提出了一种理想化的曲面投影模型,这个模型旨在更准确地模拟实际的物理过程,减少投影过程中的失真。通过比较这个理想模型与现有的模型,可以更好地理解导致畸变的原因。
接着,研究者利用理想曲面上的特征点来关联鱼眼图像点和它们的理想3D对应点。这种方法有助于在3D空间中重建图像点的位置,从而更精确地校正畸变。特征点的选择和匹配是这个过程的关键步骤,它直接影响到校正的效果。
为了找到最佳的曲面拟合,论文中采用了最小二乘法。这是一种优化技术,用于拟合数据点到一个函数,使所有点到该函数的垂直距离之和最小。在本研究中,最小二乘法用于确定一个二次曲面,这个曲面能够最接近地匹配鱼眼图像点的分布,从而提供一个有效的投影模型。
实验结果显示,采用提出的二次曲面投影模型对鱼眼图像进行校正后,图像的畸变程度显著降低,提高了图像质量和后续处理的准确性。这一成果对于改进鱼眼相机的图像处理算法,特别是在自动驾驶、无人机导航、全景图像合成等应用中具有重要的实用价值。
这篇论文贡献了一种新的鱼眼相机畸变校正方法,通过构建理想的曲面投影模型和利用最小二乘法优化,有效地减少了鱼眼图像的畸变,为相关领域的研究和应用提供了有力的理论支持。
COL 10(1), 011002(2012) CHINESE OPTICS LETTERS January 10, 2012
Quadric surface projection model for fish-eye cameras
Tiantian Meng (孟孟孟甜甜甜甜甜甜)
1∗
, Jintao Jiang (蒋蒋蒋金金金涛涛涛)
2
, and Ming Yang (杨杨杨 鸣鸣鸣)
3
1
Faculty of Information Science and Engineering, Ningbo University, Ningbo 315211, China
2
Zhejiang High-tech Medical Optoelectronic Equipment Research and Development Center,
Ningb o University, Ningbo 315211, China
∗
Corresp onding author: tpmengtt@126.com
Received April 19, 2011; accepted June 10, 2011; posted online August 30, 2011
The curved surface projection model in fisheye image correction algorithm is presented. To analyze the
causes of distortion in existing models, we establish an ideal surface projection model and compare its
surface with the surfaces of existing models. Subsequently, feature points are obtained on the ideal surface
according to the relationship of coordinates of fish-eye image points and their ideal three-dimentional (3D)
p oints. Finally, the least square method is used to obtain a quadric surface and presents a quadric surface
projection model. The experiment shows that the corrected image of the new model is more similar to the
actual scene than the corrected images of previous models.
OCIS codes: 100.3008, 100.3010, 140.1135, 140.1488.
doi: 10.3788/COL201210.011002.
Fish-eye lenses have extremely short focal length and a
very wide field of view (FOV), which is generally close
to 180
◦
or even wider
[1]
. One single fish-eye image can
represent a large part of the surroundings. Thus, use
of fish-eye lens in detection and survey systems has at-
tracted considerable attention. Wu et al.
[2,3]
have used
fish-eye lens in automatic surveillance.
In order to obtain a large FOV, a fish-eye lens uses the
“non-similar” imaging thought. As a result, consider-
able barrel distortion in fish-eye images occurs. In recent
years, fish-eye algorithm has been extensively studied.
However, fish-eye lens optical transformation is complex
and different fish-eye lens have different designs. Hughes
et al.
[4,5]
have evaluated several fish-eye algorithms and
found that one algorithm could not fit all types of fish-
eyes lenses. However, previous work did not address
fish-eye lenses with FOV beyond 180
◦
. In this letter,
a circular fish-eye lens with a FOV of 186
◦
is used. We
adopt the surface projection model to derive the coor-
dinate transformation between the fish-eye image points
and their matching scene three-dimensional (3D) points
by orthogonal projection. Spherical projection model is
used in most applications
[6−9]
. However, for orthogonal
projection, the spherical projection model inherently lim-
its the FOV of the camera to 180
◦
. When the spherical
projection model is used to correct the 186
◦
fish-eye lens,
the corrected image is marked with barrel distortion. The
parabolic projection model prop osed by Wang et al. does
not have limitations of the spherical projection
[10]
. How-
ever, several pincushion distortions exist in the corrected
image of the parabolic projection.
According to the imaging theory of fish-eye lens, the
surface projection model can simulate the optical trans-
formation process. The corresponding relationship be-
tween the target points and the fish-eye image points
can be determined by the model, and the fish-eye images
can be corrected and transformed to normal plane per-
spective images.
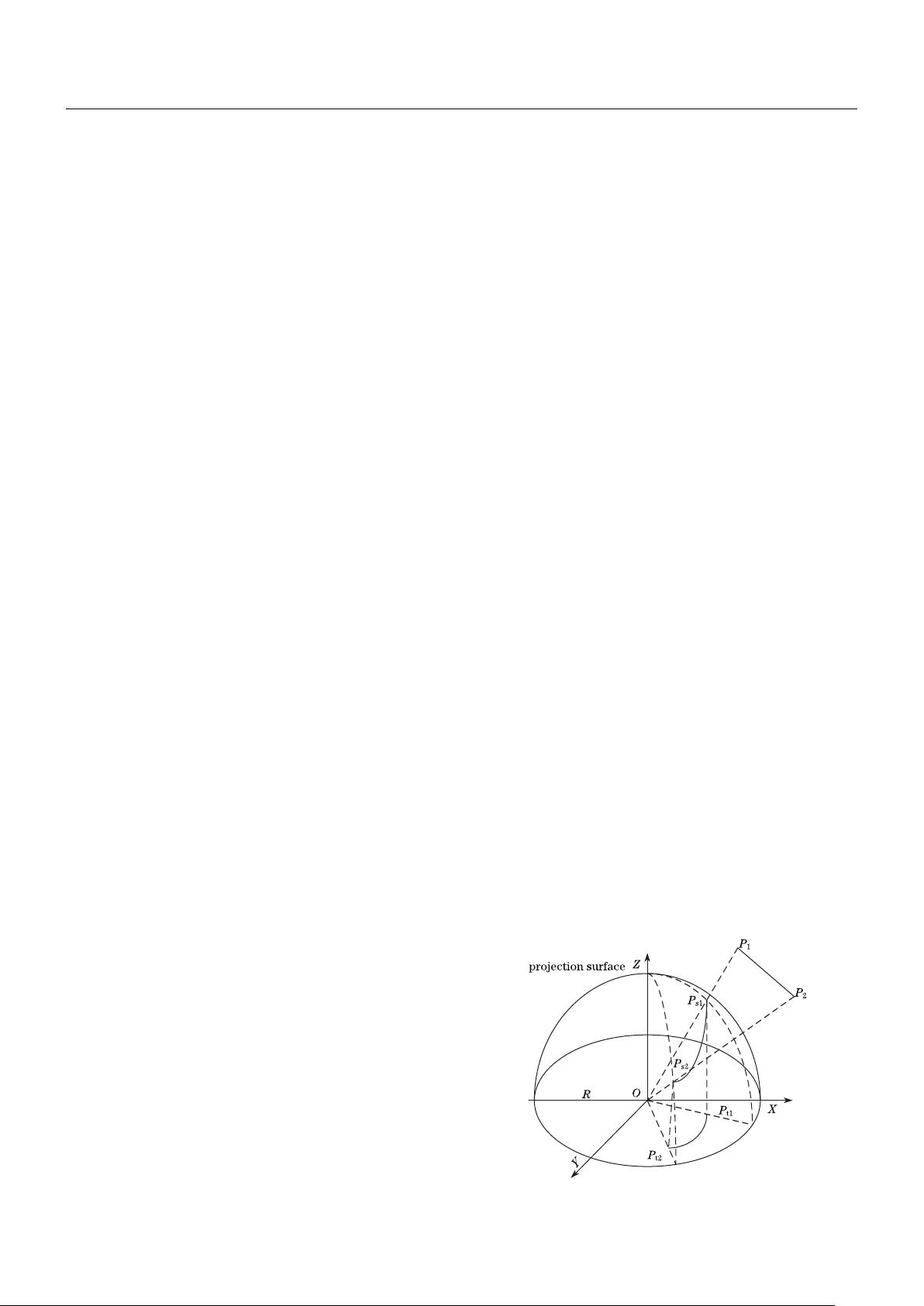
The rules of fish-eye surface projection model are
shown in Fig. 1. Suppose that the camera is at the
origin of coordinate O, shooting along the Z axis direc-
tion. The image taken by fish-eye lens is at the OXY
plane and fills a circular area. O is the center of the
fish-eye image outline and R is the radius. P
1
and P
2
are
the two points on the spatial line. P
s1
and P
s2
are the
two crossing points of OP
1
ray and OP
2
ray in relation
to the surface. Drawing lines perpendicular to the OXY
plane through the two points, we can obtain points P
t1
and P
t2
. P
t1
and P
t2
are the corresponding points in the
fish-eye imaging planes of P
1
and P
2
after the transfor-
mation of fish-eye lens. Straight lines are transformed to
curved lines by the fish-eye lens. The space coordinates
of P
1
are (X, Y, Z), the coordinates of P
t1
on the imag-
ing plane are (u, v), and the centers of the fish-eye image
outline O are (u
0
, v
0
). Consequently, the corresponding
relationship between the target points and the fish-eye
image points can be expressed as
(u − v
0
, v − v
0
) = D(X, Y, Z) , (1)
where D(X, Y, Z) represents the correction formula.
Previous studies have used the spherical projection
model to correct fish-eye images
[3−6]
. The projection
surface equation is expressed as
Fig. 1. Rules of fish-eye surface projection model.
1671-7694/2012/011002(4) 011002-1
c
° 2012 Chinese Optics Letters
下载后可阅读完整内容,剩余3页未读,立即下载
2021-04-29 上传
2021-05-23 上传
2021-07-22 上传
2019-11-12 上传
2021-02-07 上传
2020-09-21 上传
2011-09-15 上传
2017-11-03 上传
2023-07-16 上传

weixin_38501751
- 粉丝: 6
- 资源: 939
 我的内容管理
展开
我的内容管理
展开







最新资源
- Lauren-Libretti:投资组合网站
- Gmail_project
- Base:一些基本代码的库,例如 BaseAdapter、BaseActivity、BaseFragement
- DataBaseCourseWork:КурсоваяработапоБД(Веб-приложение)
- PhoneScan:Escaneanúmerosdeteléfono,desquebre de quepaíses quienemétiéel numero
- NYC Government Building Energy Usage 纽约市政府建筑能耗-数据集
- MFC Windows 程序设计之多样式控件集
- Accuinsight-1.0.28-py2.py3-none-any.whl.zip
- 翠绿
- Новости дня СМИ2-crx插件
- to-do-list:一个使用 React 和 Webpack bundler 构建的简单待办事项列表应用程序
- node-red-subflows:我的个人子流可能会有所帮助
- 11ty-site:个人博客之家,精心打造
- AssignV
- dry_ex:糖衣长生不老药结构
- Corruption Detector-crx插件
