飞思卡尔智能车:PID与鲁棒控制策略详解
需积分: 50 96 浏览量
更新于2024-07-26
收藏 807KB PDF 举报
飞思卡尔智能车是一个综合性的项目,涉及到了智能汽车软件设计中的关键环节,尤其是电机控制策略。章节内容深入探讨了如何有效控制大惯性被控对象——车辆的速度,通过PID(比例-积分-微分)控制方法来实现。PID控制是一种常用的反馈控制策略,它通过比例、积分和微分三个部分调整电机的输出,以追踪设定的速度目标。在实际应用中,由于车辆速度受电池电量、车体重量等因素影响,闭环控制系统能更好地处理这些非线性和不确定性。
在智能车的软件设计中,特别提到了一种称为"棒棒控制"的方法,它在加减速过程中引入了动态调整,以减少控制误差。PID控制器的公式展示了这种控制策略的具体计算过程,包括积分项、比例项和微分项的结合,其中积分项因车辆速度本身的积分特性而被简化,仅保留了比例和微分部分,形成PD控制。
对于弯道速度控制,策略上采取了减速措施,目的是提高模型车的稳定性,确保在入弯时安全可控。在过弯过程中,除了稳定控制外,还要考虑如何减小车体的侧向摆动,保持良好的行驶姿态,这涉及到更精细的速度调整和车辆动态模型的运用。
飞思卡尔智能车项目不仅涵盖了电机控制的基本原理和技术,还强调了实际比赛中的策略应用,如路径识别、速度控制以及适应复杂道路条件的能力,这些都是提升智能车性能的关键要素。通过深入理解和优化这些控制策略,智能车能够更加精准地执行任务,提高比赛表现。
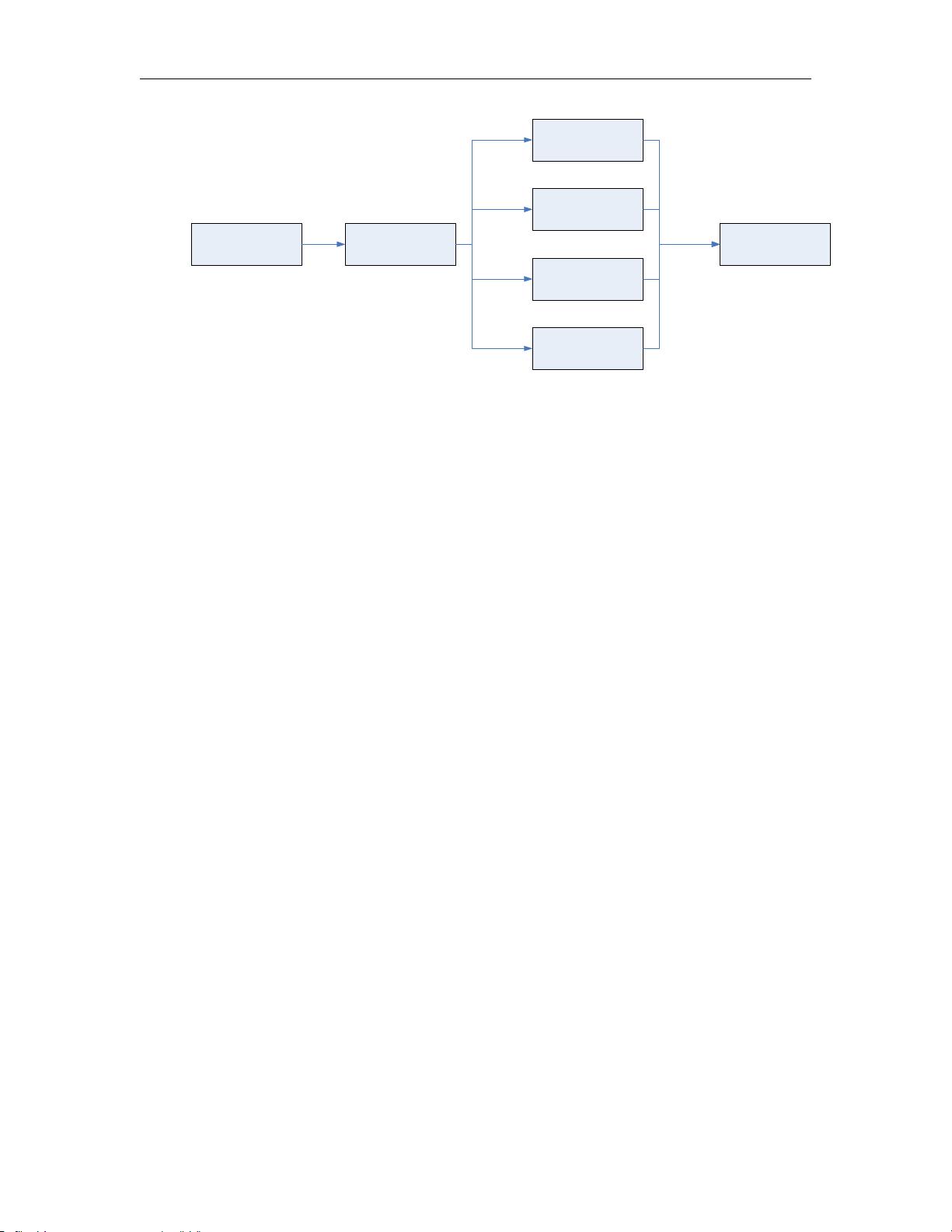
第五章 智能汽车软件设计
参数建表 路径判别
直道对应
参数及算法
弯道对应参
数及算法
小 S 道对应
参数及算法
大 S 对应参数
及算法
舵机打角
直道
弯道
小 S
大 S
图 5.10 路径规划示意图
1.7.
1.7.
1.7.
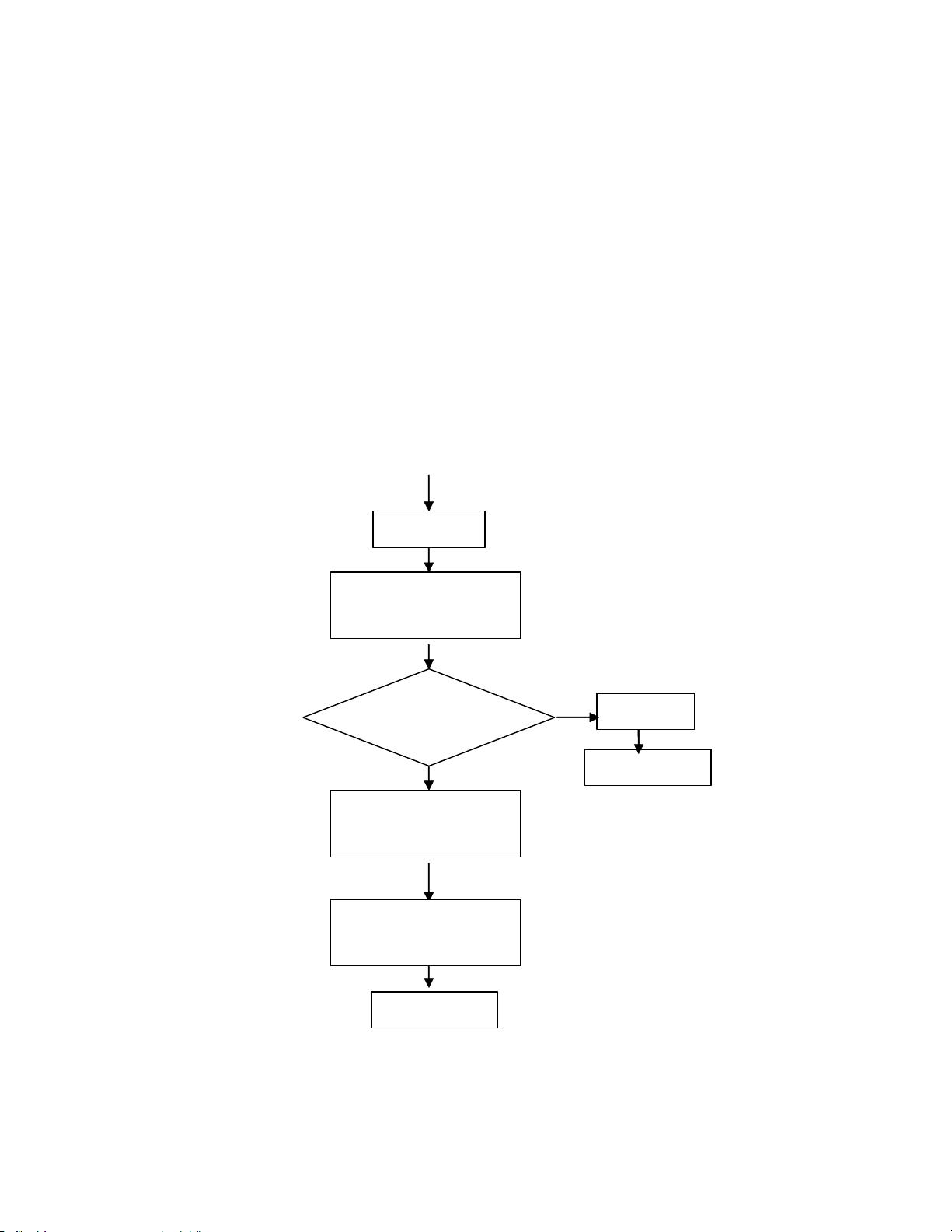
1.7. 偏航距离的计算
偏航距离的计算
偏航距离的计算
偏航距离的计算
由于已经获得了赛道中心线的位置 , 所以计算偏航距离的问题是选取何处的中
心线的距离为当前的偏航距离。控制算法的执行周期为 40ms ,如果赛车的速度 为
2m/s
,则在两次控制算法的执行中间,赛车要前进
8cm
,赛车所处的环境将发生比
较大的改变,所以赛车的控制只能算是半实时控制,这是所有使用摄像头作为主要
寻线传感器的参赛队都避免不了的问题。因为算法的滞后性,赛车需要将 “ 当前位
置 ” 进行适当前移。前移量应该跟赛车当前速度成正比,但实际中我们发现,适当

剩余68页未读,继续阅读
2010-07-03 上传
2011-04-14 上传
2010-04-14 上传
2012-03-06 上传
2009-11-10 上传
2011-10-07 上传
2010-12-02 上传

cvi670
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- cpp_from_control_to_objects_8e:从C到对象,从控制结构开始,第8版
- import:R的导入机制
- vue2+vue-router+es6+webpack+node+mongodb的项目.zip
- Golang中的神经网络+培训框架-Golang开发
- 仅在页脚部分的最后一页的最底部打印表格页脚
- mac-config:Brewfile和脚本来设置全新的Mac安装
- writexl:轻巧的便携式数据帧,用于R的xlsx导出器
- Bootstrap模态登录框
- exif_read.rar_图形图像处理_Visual_C++_
- 福橘-股票行情-crx插件
- :magnifying_glass_tilted_right::bug:Golang fmt.Println调试和跟踪工具,能够可视化函数调用路径。-Golang开发
- 投资组合:我的个人投资组合以及由React提供的Dot Net服务器
- streamy-server
- voices:p5.js小实验
- New Tab Wallpaper-crx插件
- xml-website:监控项目的网站
