Direction Cosine Matrix IMU理论简介
需积分: 12 32 浏览量
更新于2024-07-16
收藏 2.48MB PDF 举报
"direction-cosine-matrix-imu-theory.pdf"
这篇文档主要讨论了惯性测量单元(IMU)的理论,特别是涉及到方向余弦矩阵(DCM)的应用。DCM是描述三维空间中坐标系之间旋转关系的一种数学工具,广泛应用于飞行控制系统和导航系统中,例如无人机(ArduPilot)的控制。
1. 背景部分介绍了IMU的基本概念,它由陀螺仪和加速度计组成,用于测量物体在三维空间中的姿态、角速度和线性加速度。
2. 轴公约部分可能涵盖了XYZ轴的定义和约定,这是理解任何旋转矩阵和坐标变换的基础。
3. 方向余弦矩阵详细阐述了如何通过矩阵表示两个坐标系之间的相对定向,以及如何通过旋转矩阵进行坐标变换。
4. 向量点叉乘是计算旋转矩阵的一种方法,它涉及向量的非共线性和外积运算。
5. 陀螺仪信号计算方向余弦这部分讲述了如何利用陀螺仪的输出来更新DCM,以反映物体的实时旋转。
6. 重规范化和漂移消除是处理IMU数据的重要步骤,因为陀螺仪存在漂移误差,需要定期校准或通过其他传感器数据(如GPS)进行补偿。
7. GPS的提及可能是指如何结合全球定位系统数据来提高定位和姿态估计的精度。
8. 加速度计部分详细介绍了如何利用加速度计的测量值来辅助姿态估计和定位。
9. 反馈控制器可能涉及到如何使用DCM和IMU数据来设计控制算法,确保飞行器或系统的稳定。
10. 陀螺仪的特点讨论了陀螺仪的工作原理和特性,比如它们的响应速度、精度和稳定性。
11. 风的影响部分可能涉及大气风对飞行器姿态的影响及其在计算和补偿中的考虑。
12. 使用DCM控制和导航部分详细说明了如何在实际应用中使用DCM来实现飞行控制和导航任务。
13. 设计实现章节可能提供了实现DCM算法的具体步骤和技术细节。
14. 参考部分列出了相关文献和资料,供读者深入学习。
这份文档提供了一个全面的视角,深入解释了IMU工作原理,特别是DCM在姿态估计和控制中的作用,这对于理解和开发基于IMU的导航系统至关重要。同时,文档还介绍了如何参与到翻译和维护的过程中,使用Markdown和Git等工具进行协作编辑。

凑巧的是我们的一个研究人员(Premerlani)决定去制作一个带副翼的飞行器,但是发现自己
始终掌握不好必要的飞行技能。一个夏天他就坠毁了5架飞机,其中有3次还必须将飞机整个
替换掉。因此,为了更加稳定的飞行,他决定将新的飞控板安装在他的GoldbergEndurance
飞机上,如下图所示。
接下的问题是,怎样才能使其发挥出最好的效果?在我们的共同努力下,得到了与Mahony[1]
相同的结论。由于我们所需要的是一个“完全遵守旋转群非线性原理”的方法。因此我和Paul觉
得我们应该用一个方向余弦矩阵来表示旋转,可以用陀螺仪,加速度计以及GPS的信息来计
算矩阵的元素,然后用来完成控制和导航。如果大家理解得足够深入,以下便是DCM的工作
原理:
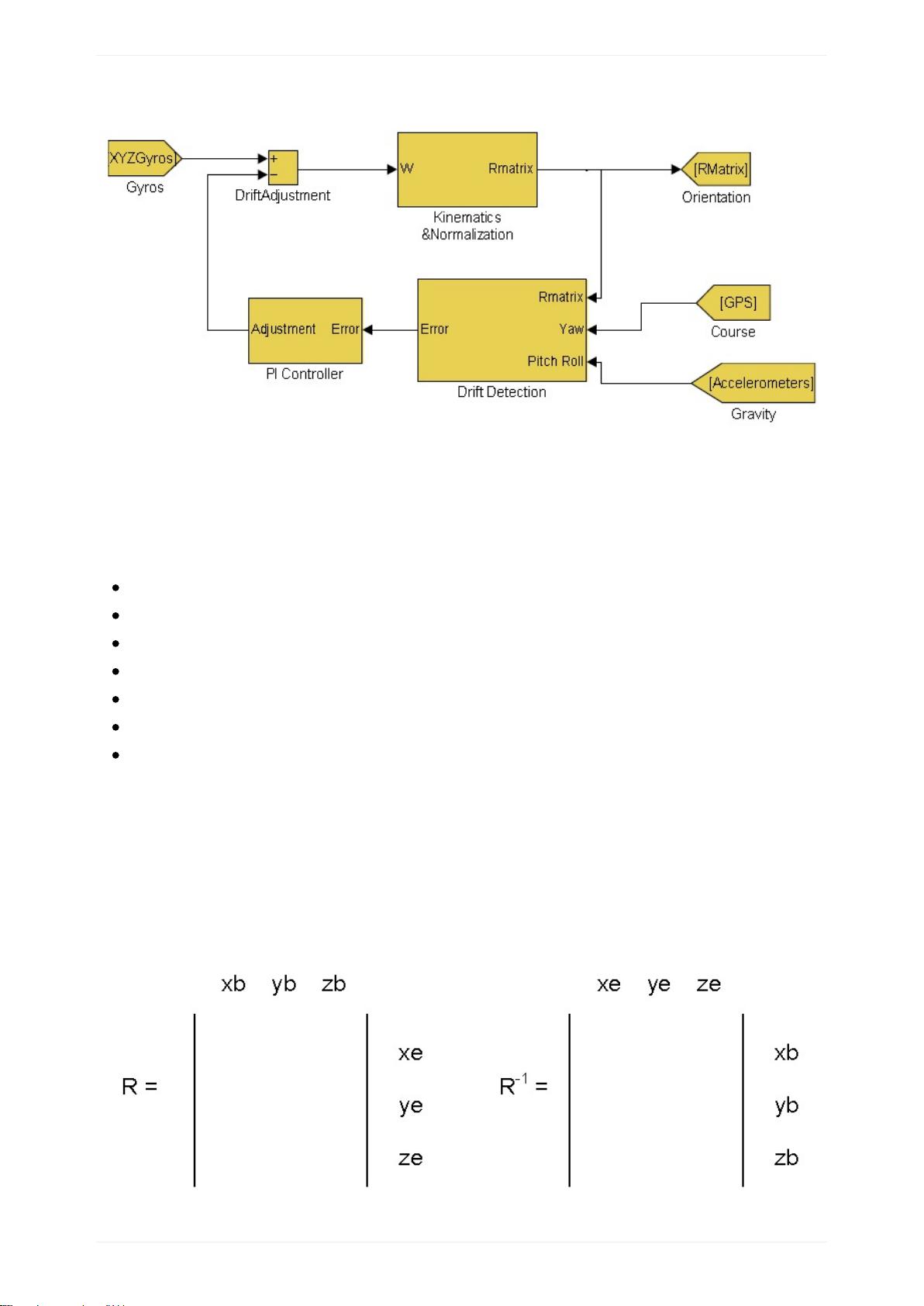
1. 陀螺仪是飞行器方位信息的主要来源。通过对飞行器的非线性微分动力学方程进行整
合,将飞行器的方位对旋转速率的时间变化率以及飞行器当前方位联系起来。这个操作
是在一个较高的频率下进行的,(40到50赫兹)常常足以为电机提供每一个输送过来的
PWM脉冲的最新信息。
2. 意识到积分产生的数值误差会逐渐破坏DCM所必须满足的正交约束,我们对矩阵的元素
做了一些常规的,小的调整,以使其重新满足约束。
3. 意识到数值误差,陀螺仪漂移,以及陀螺偏移会逐渐累积DCM元素的误差,我们使用参
考向量来检测这些误差,在检测到的误差和第1步中陀螺仪的输入之间加了一个PI负反馈
调节器,这样可以在误差增加之前更快的将其消除。在此过程中,GPS用于检测偏航误
差,加速度用于检测俯仰和横滚的误差。
背景
8
剩余40页未读,继续阅读
232 浏览量
2022-09-19 上传
134 浏览量
233 浏览量
2021-02-24 上传
207 浏览量
116 浏览量

_GHDNUI_
- 粉丝: 44
 我的内容管理
展开
我的内容管理
展开







最新资源
- 自动生成CAD模型文件的测试流程
- 掌握JavaScript中的while循环语句
- 宜科高分辨率编码器产品手册解析
- 探索3CDaemon:FTP与TFTP的高效传输解决方案
- 高效文件对比系统:快速定位文件差异
- JavaScript密码生成器的设计与实现
- 比特彗星1.45稳定版发布:低资源占用的BT下载工具
- OpenGL光源与材质实现教程
- Tablesorter 2.0:增强表格用户体验的分页与内容筛选插件
- 设计开发者的色值图谱指南
- UYA-Grupo_8研讨会:在DCU上的培训
- 新唐NUC100芯片下载程序源代码发布
- 厂家惠新版QQ空间访客提取器v1.5发布:轻松获取访客数据
- 《Windows核心编程(第五版)》配套源码解析
- RAIDReconstructor:阵列重组与数据恢复专家
- Amargos项目网站构建与开发指南
