增强现实中的多通道人-群机器人交互系统研究
58 浏览量
更新于2024-06-17
收藏 1.67MB PDF 举报
"虚拟现实智能硬件
2020年12月第6期的一篇论文探讨了增强现实中多通道人-群机器人交互系统。这篇论文由陈明轩、张平、吴泽波和陈晓丹共同撰写,发表在《虚拟现实智能硬件》期刊上,DOI为10.1016/j.vrih.2020.05.006。论文的核心在于解决人与群机器人交互的挑战,尤其是在大规模人机交互中如何实现高效、准确的沟通。
作者们提出了一种创新的人类与群机器人交互系统,该系统整合了三维手势交互通道和自然语言指令通道,以促进自然且高效的交流。具体来说,3D Lasso技术被用来通过有向包围盒选择多个机器人,实现了群体机器人的批量拣选交互。此外,他们定义了面向群体机器人的控制指令标签,这些标签可以与3D手势和自然语言指令相结合。借助基于最大熵模型的文本分类器,系统能够理解自然语言指令,而头戴式增强现实设备则作为视觉反馈的界面。
论文通过机器人选型实验验证了该系统的可行性和效率,表明这种多通道集成方法在人群中与机器人交互时能够提高沟通效率。关键词包括人群交互、增强现实以及多通道集成。
群体机器人系统的研究已经成为智能技术领域的重要方向,尤其是在多机器人系统被广泛应用到各个领域解决实际问题的背景下。群机器人系统模仿自然界中动物群体的行为,通过简单机器人之间的局部交互,共同完成复杂任务。与传统的中央控制方式不同,群机器人系统强调分布式控制,每个机器人根据自身状态和环境信息进行自组织和协调。
论文指出,群机器人系统因其分布式特性,能在单个机器人无法胜任的情况下成功完成任务,例如搜索、覆盖和集群行为。因此,设计出能够与群机器人自然、高效交互的系统对于推动这一领域的进步至关重要。这篇论文的研究成果为未来的群机器人控制系统提供了新的思路和方法,有助于进一步优化人与机器人的合作模式。"
521
Mingxuan
C
H
E
N
e
t
al
l
:一个
多层次
的
人类
-
对象,虚拟机器人是真实机器人在三维虚拟交互场景中的映射。反馈信息包括系统状态和机器人的
任务状态。
三维手势交互模块在获取控制器的手势信息后,实现机器人的选择并绘制运动轨迹。由该模块生
成的
3D
手势交互信息被传输到
自然语言指令理解和多通道集成
模块。
语音识别
模块通过语音识别引擎(
Microsoft Speech Platform SDK
)识别控制器的语音信号,并将
其转换为文本。然后,将文本传输到
自然语言指令理解和多通道集成
模块。
自然语言指令理解和多通道集成
模块接收到文本后,通过预先训练好的文本分类模型,对语音文
本中的自然语言指令进行理解,得到描述具体控制指令的标签。然后,根据指令标签的内容,结合
对应的
3D
手势交互信息,得到集成的控制指令。
消息通信
模块将来自
自然语言指令理解和多通道集成
模块的控制指令分发给群机器人,并将接收
到的任务执行结果和反馈信息(如机器人状态信息)发送给
增强现实显示
模块进行可视化。
3 增强现实的3D手势交互技术
3.1 手势数据的获取及三维虚拟交互场景的建立
手势数据由
Leap Motion
获得,
Leap Motion
是
Leap
的身体运动控制器。当控制器的手出现在传感器
的工作空间时,它可以识别和捕获人手信息,并将每个时刻捕获的数据封装在数据帧中。每个数据
帧包含在该时刻捕获的手部参数,包括手掌位置、法向量和移动速度,以及指尖的位置、方向和移
动速度。
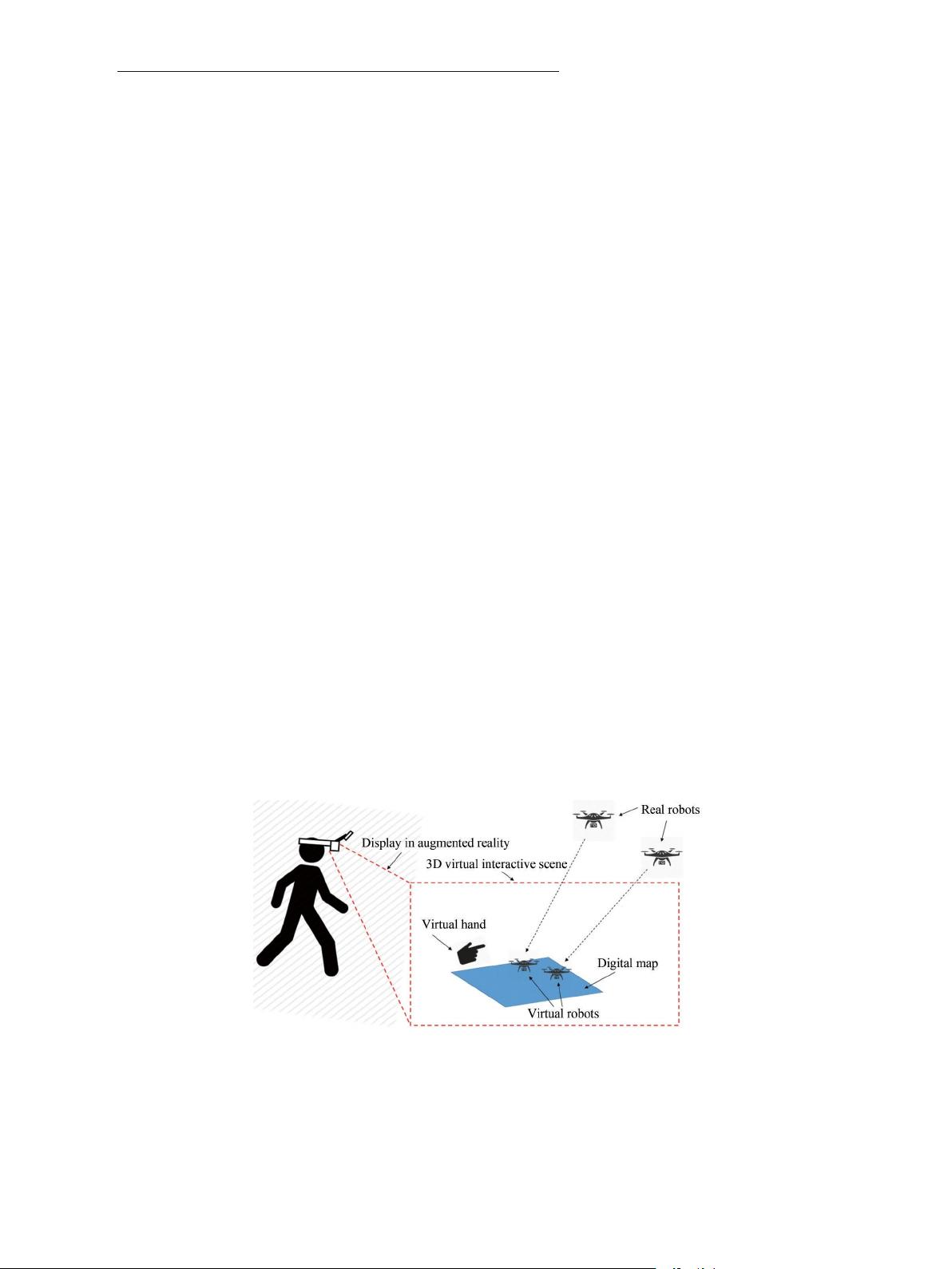
该系统使用增强现实作为视觉反馈通道。控制器在由增强现实设备呈现的
3D
虚拟交互环境中与数
字地图和虚拟机器人交互。如图
2
所示,在
3D
虚拟交互场景中,数字地图包含了机器人实际工作场
景的环境信息。虚拟机器人是真实机器人在虚拟场景中的映射。虚拟机器人在交互场景中的坐标由
真实机器人的位置决定。
图
2 3D
虚拟交互场景。
剩余15页未读,继续阅读
2024-06-17 上传
2012-06-30 上传
2018-12-27 上传
2019-09-12 上传
2021-02-12 上传
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
