28BYJ-48步进电机与单片机控制详解
需积分: 0 82 浏览量
更新于2024-09-15
收藏 272KB DOC 举报
"这篇资料介绍了步进电机的工作原理、驱动方式以及如何使用单片机进行控制,特别是28BYJ-48型号的步进电机。资料中提到了步进电机通过接收脉冲信号来转换成角度位移,并且详细阐述了四相步进电机的不同通电方式,如四拍、双四拍和八拍。此外,还说明了单片机(以AT89X52为例)如何通过ULN2003驱动芯片控制步进电机的旋转方向,提供了逆时针和顺时针旋转的相序数组。"
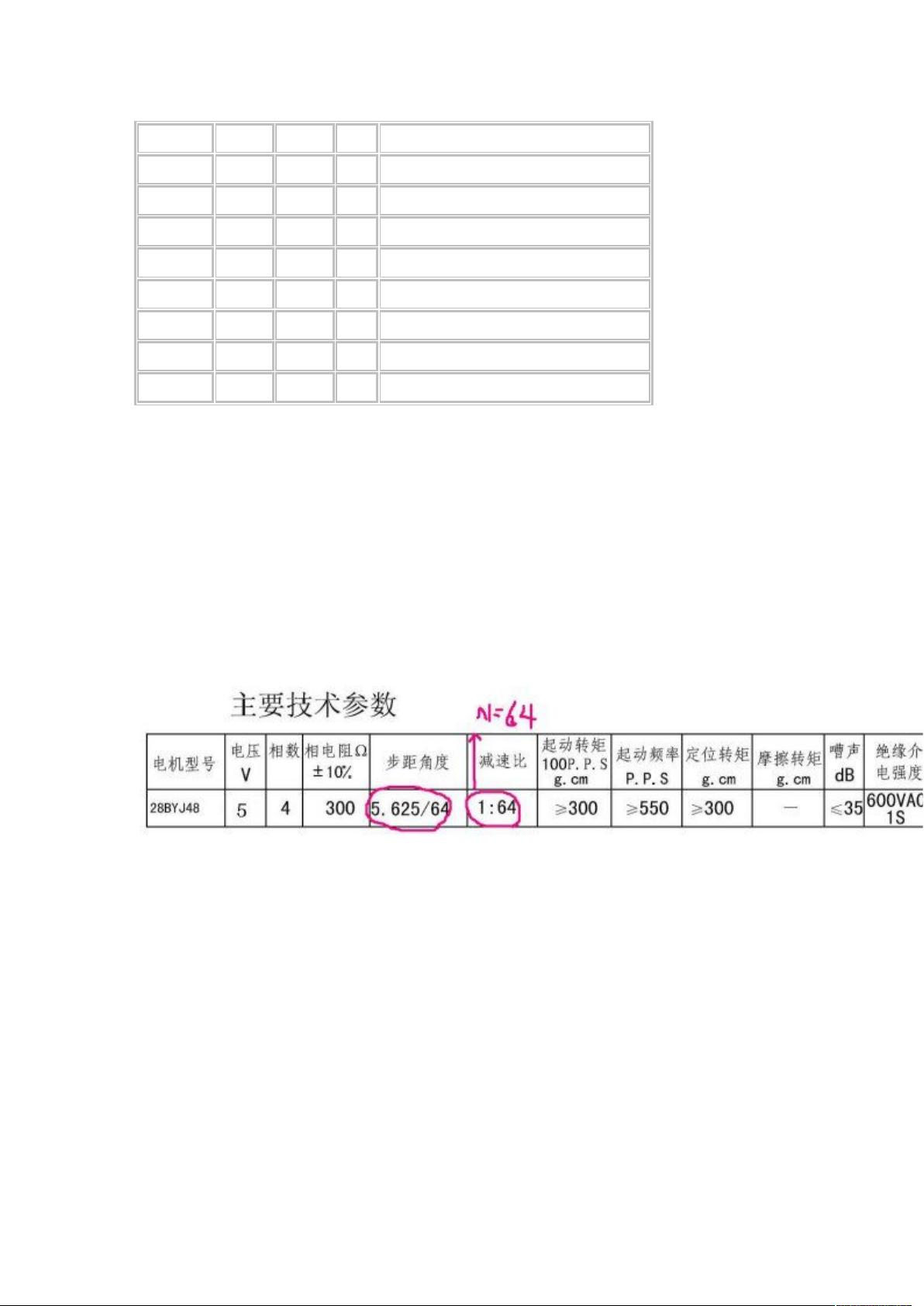
步进电机是一种精密的电机,其基本工作原理是将电脉冲信号转换为精确的机械位移。28BYJ-48步进电机是一种四相步进电机,适用于微步进控制,通常在5V至12V直流电压下工作。当电机收到一个脉冲信号,它的转子会转动一个固定的步进角,这个角通常由电机的结构决定。通过调整脉冲的数量和频率,可以实现电机的精确定位和速度控制。
在四相步进电机中,通电方式对电机的运行有直接影响。常见的通电方式包括单四拍、双四拍和八拍。单四拍是指每次只有一相绕组通电,而双四拍则是每次两个相绕组通电。八拍则是所有通电模式的完整循环,每一步都涉及到一个相位的切换,提供了更平滑的旋转。
在实际应用中,单片机如AT89X52的输出信号通常不足以直接驱动步进电机,因此需要通过驱动电路如ULN2003进行放大。该驱动芯片能够处理较高的电流,安全地驱动步进电机。在图示中,步进电机的四个线圈分别连接到单片机的P1.0到P1.3口,通过特定的脉冲序列来控制电机的旋转。
为了使步进电机按照预定方向旋转,需要定义正确的相序。代码中定义了两个数组,`CCW[8]`和`CW[8]`,分别代表逆时针和顺时针旋转的相序。这些数组包含了对应不同步进电机状态的P1口十六进制值,按照数组顺序输出脉冲就可以控制电机按指定方向旋转。
通过编程,可以设置定时器产生脉冲,然后使用中断服务程序根据相序数组改变P1口的输出状态,从而驱动步进电机以预设的速度和方向转动。这种方法既实现了精准的定位,又能够灵活调整电机的转速和方向,广泛应用于自动化设备、精密定位系统等需要高精度运动控制的场合。
橙 黄 粉 蓝 十六制( 口)
顺序刚好相反
所以可以定义旋转相序
!"
#$%&'((((((()*++逆时钟旋
转相序表
!"#$%&'((((((()*
++正时钟旋转相序表
C 语言代码:
,-./!"0123
,-./!"0-.4-.53
,!"6.".5-7."!
,!"6."-.4.5-7."!-.4
!"
#$%&'((((((()*++逆时钟旋
转相序表
剩余10页未读,继续阅读
2008-12-03 上传
2022-07-08 上传
2022-09-19 上传
2022-07-14 上传
2022-07-14 上传
2022-07-08 上传
2011-06-14 上传

nmc123
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
